graphics » 图像处理理论(三)——图像金字塔, 双边滤波, Steerable滤波, Gabor滤波
2016-07-16 :: 5782 Words边缘检测(续)
波纹算子
\[s_x=\left[\begin{array}{ccc} 0&-1&d\\ 1&0&-1 \\ -d&1&0\end{array} \right],s_y=\left[\begin{array}{ccc} d&-1&0\\ -1&0&1 \\ 0&1&-d\end{array} \right]\]对称梯度算子和波纹算子都属于边缘子空间基。
直线算子
\[s_x=\left[\begin{array}{ccc} 0&1&0\\ -1&0&-1 \\ 0&1&0\end{array} \right],s_y=\left[\begin{array}{ccc} -1&0&1\\ 0&0&0 \\ 1&0&-1\end{array} \right]\]直线算子和拉普拉斯算子都属于直线子空间基。
边界闭合
如果像素\((s,t)\)在像素\((x,y)\)的领域,且满足以下条件:
\[\mid G(s,t)-G(x,y)\mid \le 幅度阀值T\] \[\mid \theta(s,t)-\theta(x,y)\mid \le 角度阀值A\]则可将像素\((s,t)\)和像素\((x,y)\)连接起来。
canny算法
Canny边缘检测算子是John F.Canny于1986年开发出来的一个多级边缘检测算法。
John F. Canny,1958年生,澳大利亚计算机科学家。MIT博士,UCB教授。
1.应用高斯滤波来平滑图像,目的是去除噪声。
2.找寻图像的强度梯度(intensity gradients)
3.应用非最大抑制(non-maximum suppression)技术来消除边误检(本来不是但检测出来是)。
4.应用双阈值的方法来决定可能的(潜在的)边界。
5.利用滞后技术来跟踪边界。
1、2的基本原理,上面已经讨论过了,这里不再赘述。
非最大抑制
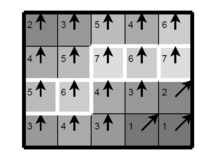
图中的数字代表了像素点的梯度强度,箭头方向代表了梯度方向。以第二排第三个像素点为例,由于梯度方向向上,则将这一点的强度(7)与其上下两个像素点的强度(5和4)比较,由于这一点强度最大,则保留。
双阈值(Double Thresholding)
设定一个阈值上界和阈值下界,图像中的像素点如果大于阈值上界,则认为必然是边界(称为强边界,strong edge),小于阈值下界则认为必然不是边界,两者之间的,被认为是候选项(称为弱边界,weak edge)。
滞后的边界跟踪
和强边界相连的弱边界认为是边界,其他的弱边界则被抑制。
参考:
http://www.cse.iitd.ernet.in/~pkalra/csl783/canny.pdf
距离变换
距离变换(distance transform)是一种将二值图像灰度化的变换。
方法:
首先对图像进行二值化处理(这里的二值化通常是边缘检测后的结果),然后给每个像素赋值为离它最近的边界像素点与其的距离(Manhattan距离或欧氏距离),以得到distance metric(距离矩阵),那么离边界越远的点越亮。
效果图:
![]()
这种效果通常叫做羽化效果。
常用的距离公式有:
\[\rho(r)=\frac{r^2}{2}\] \[\rho(r)=r\] \[\rho(r)=2\left(\sqrt{1+\frac{r^2}{2}}-1\right)\] \[\rho(r)=C^2\left(\frac{r}{C}-log\left(1+\frac{r}{C}\right)\right),C=1.3998\] \[\rho(r)=\frac{C^2}{2}\left[1-\exp\left(-\left(\frac{r}{C}\right)^2\right)\right],C=2.9846\]锐化
锐化是与模糊相反的图像操作,它的主要思想是增大图像色彩(或灰度)的对比度,简单的说就是:让亮的更亮,让暗的更暗。因此,锐化操作和边缘检测有很大的共同点,常用的锐化算法有梯度锐化和拉普拉斯锐化。
梯度锐化
\[g=\begin{cases} f+C, & G>T \\ f, & G\le T \\ \end{cases}\]当像素\((x,y)\)的梯度G大于阀值T时,在旧的像素值f上加上常数C,否则,保持原值。
拉普拉斯锐化
\[g=f+\nabla^2f\]其中\(\nabla^2f\)表示f的二阶导数。
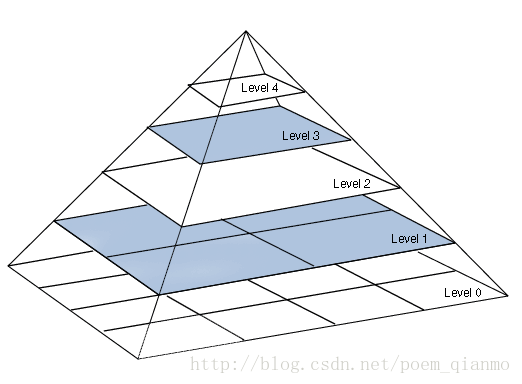
图像金字塔
一幅图像的金字塔是一系列以金字塔形状排列的分辨率逐步降低,且来源于同一张原始图的图像集合。
图像金字塔在机器视觉和图像压缩领域使用的比较多,比如OpenGL中的纹理处理。
图像金字塔有两种基本操作:
1.对图像向上采样:PyrUp——图像尺寸加倍。
2.对图像向下采样:PyrDown——图像尺寸减半。
这两种操作由于是针对图像尺寸而言的,因此,其方向和上图所示的金字塔的方向相反。
高斯金字塔
高斯金字塔是通过高斯平滑和亚采样获得一些列下采样图像,也就是说第K层高斯金字塔通过平滑、亚采样就可以获得K+1层高斯图像,高斯金字塔包含了一系列低通滤波器,其截至频率从上一层到下一层是以因子2逐渐增加,所以高斯金字塔可以跨越很大的频率范围。
拉普拉斯金字塔
一般来说,由于PyrDown的过程会损失部分图像信息,因此通常情况下:
\[G_i\neq PyrUp(PyrDown(G_i))\]为了使PyrUp和PyrDown可逆,这里引入拉普拉斯金字塔的概念。其定义如下:
\[L_i=G_i-PyrUp(G_{i+1})=G_i-Up(G_{i+1})\otimes H_{5\times 5}\]其中UP操作是将源图像中位置为(x,y)的像素映射到目标图像的(2x+1,2y+1)位置,\(H_{5\times 5}\)表示5x5的高斯核。
整个拉普拉斯金字塔运算过程可以通过下图来概括:
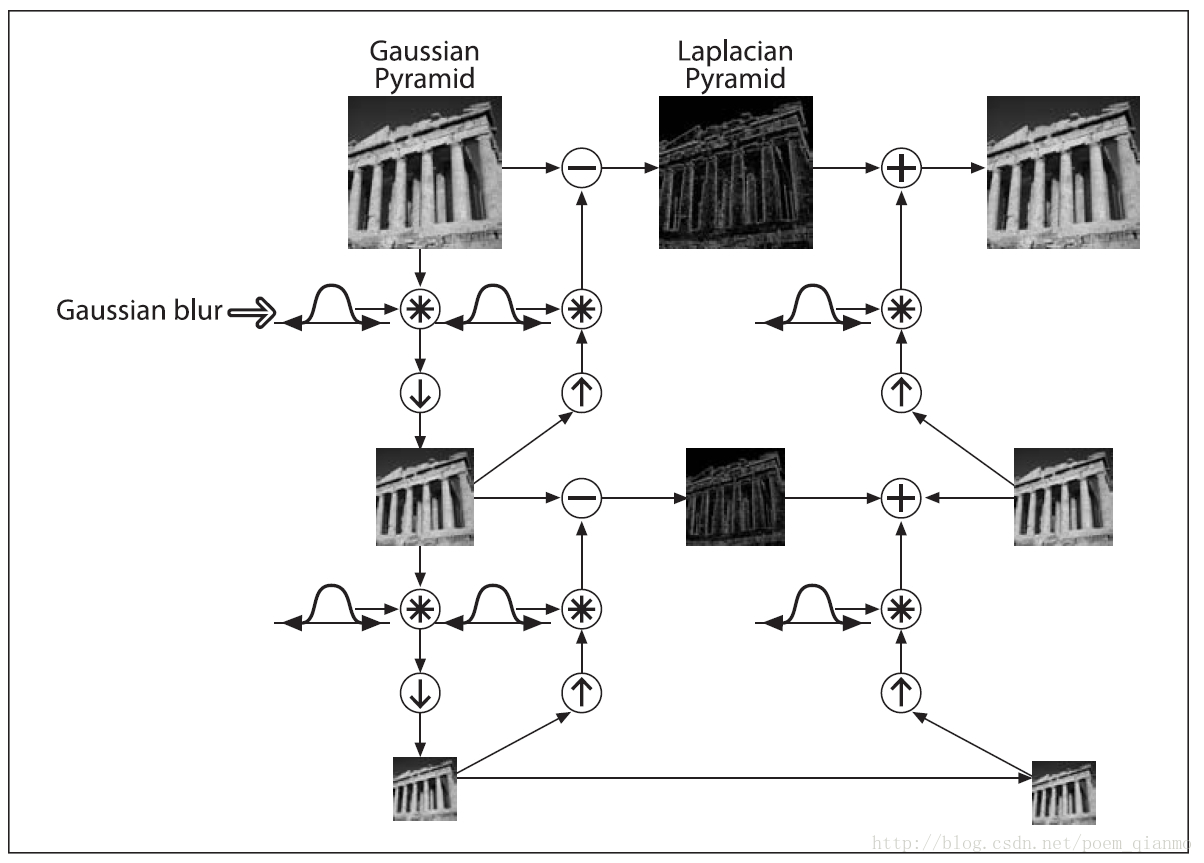
图中最左列和最右列都是高斯金字塔,中间一列是拉普拉斯金字塔。
严格来说,这样的金字塔应该叫做高斯差分金字塔,只不过高斯差分恰好是拉普拉斯算子的近似解,故名。
参考:
https://mp.weixin.qq.com/s/d17B0KaevV1LJDNgxgPLhg
深度优化局部拉普拉斯金字塔滤波器
Steerable金字塔
将拉普拉斯金字塔中的高斯滤波函数,换成Steerable滤波函数即可。
双边滤波(Bilateral filter)
双边滤波(Bilateral filter)是一种可以保边去噪的滤波器。其输出像素的值依赖于邻域像素的值的加权组合,即:
\[g(i,j)=\frac{\sum_{k,l}f(k,l)w(i,j,k,l)}{\sum_{k,l}w(i,j,k,l)}\]也就是:
\[h=\frac{w(i,j,k,l)}{\sum_{k,l}w(i,j,k,l)}\]其中,
\[w(i,j,k,l)=d(i,j,k,l)\cdot r(i,j,k,l)=\exp\left(-\frac{(i-k)^2+(j-l)^2}{2\sigma_d^2}\right)\cdot \exp\left(-\frac{\|f(i,j)-f(k,l)\|^2}{2\sigma_r^2}\right)\]这里的\(d(i,j,k,l)\)由于只与定义域有关,通常叫做“定义域核”。实际上,这就是一个高斯滤波核。而\(r(i,j,k,l)\)由于和像素值的差有关(像素差越大,权重越小),也被叫做“值域核”。
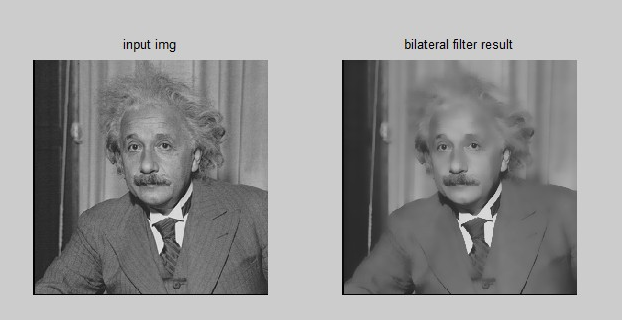
从效果来说,双边滤波可产生类似美肤的效果。皮肤上的皱纹和斑,与正常皮肤的差异,远小于黑白眼珠之间的差异,因此前者被平滑,而后者被保留。
为了体现效果,这里来张大叔的照片。
参考:
https://mp.weixin.qq.com/s/JbrZRTwkI7yeC5hOr8g_Mw
Bilateral Solver双边算子原理及应用
https://zhuanlan.zhihu.com/p/310710051
pytorch实现双边滤波
导向滤波
https://blog.csdn.net/weixin_43194305/article/details/88959183
导向滤波(Guided Filter)公式详解
https://zhuanlan.zhihu.com/p/161666126
导向滤波原理(Guided Filter)
https://zhuanlan.zhihu.com/p/279602383
四种图像滤波算法实现及原理解析
Steerable滤波
高斯滤波是一种各向同性滤波,如果想要对特定方向进行滤波的话,可使用Steerable滤波。
对最简二维高斯函数\(G(x,y)=e^{-(x^2+y^2)}\)求1阶偏导可得:
\[G_1^0=\frac{\partial G(x,y)}{\partial x}=-2xe^{-(x^2+y^2)},G_1^{\frac{\pi}{2}}=\frac{\partial G(x,y)}{\partial y}=-2ye^{-(x^2+y^2)}\]这就是两个轴向上的1阶Steerable滤波函数。
任意角度的1阶Steerable滤波函数为:
\[G_1^{\theta}=\cos\theta G_1^0+\sin\theta G_1^{\frac{\pi}{2}}\]如果对高斯函数求2阶偏导,还可得到2阶Steerable滤波函数。进一步的讨论详见参考论文。
参考:
1991年IEEE论文:《The Design and Use of Steerable Filters》
作者:William T. Freeman,斯坦福大学本科+斯坦福/康奈尔大学双料硕士+麻省理工学院博士,麻省理工学院教授。1987年,曾做为访问学者在太原理工大学待了一学年。不知道爱不爱吃刀削面(^ω^)
Edward H. Adelson,密歇根大学博士,麻省理工学院教授。
Gabor滤波
基、线性无关、正交
一般的函数可以展开为幂级数或者Fourier级数。这些级数中的幂函数或者正弦函数,被称作“基(basis)函数”。
基的属性主要涉及“线性无关”和“正交”这两个名词。
线性无关的几何含义:在\(R^3\)(3维空间)中,如果三个向量不共面,则它们相互线性无关。
基如果线性无关,则其函数的级数展开式是唯一的。由于线性相关基使用的比较少,以下如无特指,基均为线性无关基。
正交的几何含义:两个向量正交,则它们是相互垂直的。
正交基一定线性无关,反之则不成立。一般采用施密特正交化方法,将线性无关基,转换为正交基。
幂级数是线性无关基,而Fourier级数是正交基。
Gabor wavelet
除了以上两种常用的基函数外,其他函数也可以作为基函数。其中使用最多的基函数是小波(wavelet)函数,其变换也被称作小波变换。
需要指出的是,小波函数不是一个函数,而是一类函数。Gabor函数就是小波函数的其中一种,其定义如下:
\[g_{t,n}(x)=g(x-al)e^{2\pi ibnx},-\infty<l,n<+\infty\]这里的\(a,b\)为常数,\(g\)为\(L^2(R)\)(立方可积函数),且\(\parallel g\parallel=1\)。
Dennis Gabor(1900~1979),全息学创始人,1971年获诺贝尔物理学奖,著有《Theory of Communication》(1946)。
当\(g\)为高斯函数时,可得到Gabor wavelet:
\[f(x)=e^{-(x-x_0)^2/a^2}e^{-ik_0(x-x_0)}\]Gabor wavelet的性质:
1.Gabor wavelet的Fourier变换还是Gabor wavelet:
\[F(k)=e^{-(k-k_0)^2a^2}e^{-ix_0(k-k_0)}\]2.从物理上来说,Gabor wavelet等效于在一个正弦载波(频域)上,调制一个高斯函数(时空域)。这也是Dennis Gabor最早提出它的时候的用途。
3.Fourier变换是信号在整个时域内的积分,因此反映的是信号频率的统计特性,没有局部化分析信号的功能。而Gabor变换是一种短时Fourier变换,具有良好的时频局部化特性,即非常容易地调整Gabor滤波器的方向、基频带宽及中心频率,从而能够最好的兼顾信号在时空域和频域中的分辨能力。
Gabor filter
将Gabor wavelet扩展到2维,可得到Gabor filter(图像实际上就是一种2维信号):
\[g(x,y;\lambda,\theta,\psi,\sigma,\gamma)=\exp\left(-\frac{x'^2+\gamma^2y'^2}{2\sigma^2}\right)\exp\left(i\left(2\pi\frac{x'}{\lambda}+\psi\right)\right)\]其中,
\[x'=x\cos\theta+y\sin\theta,y'=-x\sin\theta+y\cos\theta\]
您的打赏,是对我的鼓励
