Generative Model » GAN(一)——Vanilla GAN
2019-03-19 :: 5686 WordsVanilla GAN
GAN是“生成对抗网络”(Generative Adversarial Networks)的简称,由2014年还在蒙特利尔读博士的Ian Goodfellow引入深度学习领域。
Ian J. Goodfellow,斯坦福大学本硕+蒙特利尔大学博士。导师是Yoshua Bengio。现为Google研究员。
个人主页:
http://www.iangoodfellow.com/
论文:
《Generative Adversarial Nets》
教程:
https://deepgenerativemodels.github.io
CS 236: Deep Generative Models
李宏毅的DL课程中也有GAN的章节,篇幅还不短。
Goodfellow相关资源:
http://www.iangoodfellow.com/slides/2016-12-04-NIPS.pdf
Goodfellow的历年演讲:(基本全是GAN,没啥新领域。。。)
https://mp.weixin.qq.com/s/GobKiuxgZv0-ufSRBpTcIA
Ian Goodfellow ICCV2017演讲:解读GAN的原理与应用
https://mp.weixin.qq.com/s/NDZPPA-0FhqSzRndQOhNEw
Google GAN之父Ian Goodfellow 最新演讲:生成对抗网络介绍
https://mp.weixin.qq.com/s/b8g_wNqi4dD5x9whj9ZN4A
争议、流派,有关GAN的一切:Ian Goodfellow Q&A
https://mp.weixin.qq.com/s/RYMvgbOgZYjMOIxygpYWSQ
Ian GoodFellow ICLR 2019演讲:对抗机器学习的进展与挑战
https://mp.weixin.qq.com/s/LL6kheCrJ07PtJ6NleIKTA
IanGoodfellow自注意力GAN的代码与PPT
通俗解释
对于GAN来说,最通俗的解释就是“伪造者-鉴别者”的解释,如艺术画的伪造者和鉴别者。一开始伪造者和鉴别者的水平都不高,但是鉴别者还是比较容易鉴别出伪造者伪造出来的艺术画。但随着伪造者对伪造技术的学习后,其伪造的艺术画会让鉴别者识别错误;或者随着鉴别者对鉴别技术的学习后,能够很简单的鉴别出伪造者伪造的艺术画。这是一个双方不断学习技术,以达到最高的伪造和鉴别水平的过程。
从上面的解释可以看出,GAN实际上是一种零和游戏上的无监督算法。
基本原理
上面的解释虽然通俗,却并未涉及算法的实现。要实现上述原理,至少要解决三个问题:
1.什么是伪造者。
2.什么是鉴别者。
3.如何对抗。
以下文章的组织顺序,主要参考下文:
http://kexue.fm/archives/4439/
互怼的艺术:从零直达WGAN-GP
还有李宏毅的课程。
老规矩,摘要+点评。
伪造者
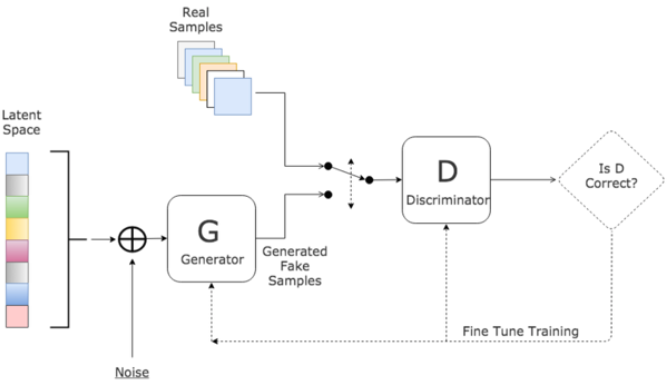
伪造者在这里实际上是一种Generative算法。伪造的内容是:将随机噪声映射为我们所希望的正样本。
随机噪声我们一般定义为均匀分布,于是上面的问题可以转化为:如何将均匀分布X映射为正样本分布Y。
首先,我们思考一个简单的问题:如何将\(U[0,1]\)映射为\(N(0,1)\)?
理论上的做法是:将\(X∼U[0,1]\)经过函数\(Y=f(X)\)映射之后,就有\(Y∼N(0,1)\)了。设\(\rho(x)\)是\(U[0,1]\)是概率密度函数,那么\([x,x+dx]\)和\([y,y+dy]\)这两个区间的概率应该相等,而根据概率密度定义,\(\rho(x)\)不是概率,\(\rho(x)dx\)才是概率,因此有:
\[\rho(x)dx=\frac{1}{\sqrt{2\pi}}\exp\left(-\frac{y^2}{2}\right)dy\]即:
\[\int_{0}^x \rho(t)dt=\int_{-\infty}^{y}\frac{1}{\sqrt{2\pi}}\exp\left(-\frac{t^2}{2}\right)dt=\Phi(y)\]其中,\(\Phi(y)\)是标准正态分布的累积分布函数,所以
\[y=\Phi^{-1}\left(\int_0^x \rho(t)dt\right)\]注意到累积分布函数是无法用初等函数显式表示出来的,更不用说它的逆函数了。说白了,\(Y=f(X)\)的f的确是存在的,但很复杂,以上解只是一个记号,该算的还是要用计算机算。
正态分布是常见的、相对简单的分布,但这个映射已经这么复杂了。如果换了任意分布,甚至概率密度函数都不能显式写出来,那么复杂度可想而知~
考虑到我们总可以用一个神经网络来拟合任意函数。这里不妨用一个带有多个参数的神经网络\(G(X,\theta)\)去拟合f?只要把参数\(\theta\)训练好,就可以认为\(Y=G(X,\theta)\)了。这里的G是Generator的意思。
正样本分布
如上所述,一般的正样本(Real Samples)分布是很难给出概率密度函数的。然而,我们可以换个角度思考问题。
假设有一批服从某个指定分布的数据\(Z=(z_1,z_2,\dots,z_N)\),根据概率论的相关定义,我们至少可以使用离散采样的方法,根据Z中的样本分布,来近似求出Z的指定分布。下文如无特殊指出,均以Z中的样本分布来代替Z的指定分布,简称Z的分布。
那么接着就有另一个问题:如何评估\(G(X,\theta)\)生成的样本的分布和Z的分布之间的差异呢?
KL散度
比较两个分布的差异的最常用指标是KL散度。其定义参见《机器学习(九)》。
JS散度
因为KL散度不是对称的,有时候将它对称化,即得到JS散度(Jensen–Shannon divergence):
\[JS\Big(p_1(x),p_2(x)\Big)=\frac{1}{2}KL\Big(p_1(x)\|p_2(x)\Big)+\frac{1}{2}KL\Big(p_2(x)\|p_1(x)\Big)\]Claude Elwood Shannon,1916~2001,美国数学家,信息论之父。密歇根大学双学士+MIT博士。先后供职于贝尔实验室和MIT。
KL散度和JS散度,也是Ian Goodfellow在原始GAN论文中,给出的评价指标。
虽然KL散度和JS散度,在这里起着距离的作用,但它们不是距离,它们不满足距离的三角不等式,因此只能叫“散度”。
神经距离
假设我们可以将实数域分成若干个不相交的区间\(I_1,I_2,\dots,I_K\),那么就可以估算一下给定分布Z的概率分布:
\[p_z(I_i)=\frac{1}{N}\sum_{j=1}^{N}\#(z_j\in I_i)\]其中\(\#(z_j\in I_i)\)表示如果\(z_j\in I_i\),那么取值为1,否则为0。
接着我们生成M个均匀随机数\(x_1,x_2,\dots,x_M\)(这里不一定要\(M=N\),还是那句话,我们比较的是分布,不是样本本身,因此多一个少一个样本,对分布的估算也差不了多少。),根据\(Y=G(X,\theta)\)计算对应的\(y_1,y_2,\dots,y_M\),然后根据公式可以计算:
\[p_y(I_i)=\frac{1}{M}\sum_{j=1}^{M}(y_j\in I_i)\]现在有了\(p_z(I_i)\)和\(p_y(I_i)\),那么我们就可以算它们的差距了,比如可以选择JS距离
\[\text{Loss} = JS\Big(p_y(I_i), p_z(I_i)\Big)\]假如我们只研究单变量概率分布之间的变换,那上述过程完全够了。然而,很多真正有意义的事情都是多元的,比如在MNIST上做实验,想要将随机噪声变换成手写数字图像。要注意MNIST的图像是28*28=784像素的,假如每个像素都是随机的,那么这就是一个784元的概率分布。按照我们前面分区间来计算KL距离或者JS距离,哪怕每个像素只分两个区间,那么就有\(2^{784}\approx 10^{236}\)个区间,这是何其巨大的计算量!
为此,我们用神经网络L定义距离:
\[L\Big(\{y_i\}_{i=1}^M, \{z_i\}_{i=1}^N, \Theta\Big)\]其中,\(\Theta\)为神经网络的参数。
对于特定的任务来说,\(\{z_i\}_{i=1}^N\)是给定的,并非变量,因此上式可简写成:
\[L\Big(\{y_i\}_{i=1}^M, \Theta\Big)\]通常,我们采用如下的L实现:
\[L=\frac{1}{M}\sum_{i=1}^M D\Big(y_i,\Theta\Big)\]上式可以简单的理解为:分布之间的距离,等于单个样本的距离的平均。
这里的神经网络\(D(Y,\Theta)\),实际上就是GAN的另一个主角——鉴别者。这里的D是Discriminator的意思。
如何对抗
因为\(D(Y,\Theta)\)的均值,也就是L,是度量两个分布的差异程度,这就意味着,L要能够将两个分布区分开来,即L越大越好。即:
\[D^* = \arg \max_D V(G,D)\tag{1}\]但是我们最终的目的,是希望通过均匀分布而生成我们指定的分布,所以\(G(X,\theta)\)则希望两个分布越来越接近,即L越小越好。即:
\[G^* = \arg \min_G \max_D V(G,D)\tag{2}\]具体的做法是:
Step1
随机初始化\(G(X,\theta)\),固定它,然后生成一批Y,这时候我们要训练\(D(Y,\Theta)\),既然L代表的是“与指定样本Z的差异”,那么,如果将指定样本Z代入L,结果应该是越小越好,而将Y代入L,结果应该是越大越好,所以
\[\begin{aligned}\Theta =& \mathop{\arg\min}_{\Theta} L = \mathop{\arg\min}_{\Theta} \frac{1}{N}\sum_{i=1}^N D\Big(z_i,\Theta\Big)\\ \Theta =& \mathop{\arg\max}_{\Theta} L = \mathop{\arg\max}_{\Theta} \frac{1}{M}\sum_{i=1}^M D\Big(y_i,\Theta\Big)\end{aligned}\]然而有两个目标并不容易平衡,所以干脆都取同样的样本数B(一个batch),然后一起训练就好:
\[\begin{aligned}\Theta =& \mathop{\arg\min}_{\Theta} L_1\\ =&\mathop{\arg\min}_{\Theta} \frac{1}{B}\sum_{i=1}^B\left[D\Big(z_i,\Theta\Big)-D\Big(y_i,\Theta\Big)\right]\end{aligned}\tag{3}\]公式3的简略推导如下:
\[\ell(\theta)=\log L(\theta)=\sum_{i=1}^my^{(i)}\log h_\theta(x^{(i)})+\sum_{i=1}^m(1-y^{(i)})\log(1-h_\theta(x^{(i)}))\]上式是二分类的对数似然函数。(参见《机器学习(二)》)具体到这里,可以改写为:
\[E_{x\sim P_{data}}[\log D(x)]+E_{x\sim P_{G}}[\log (1-D(x))]\]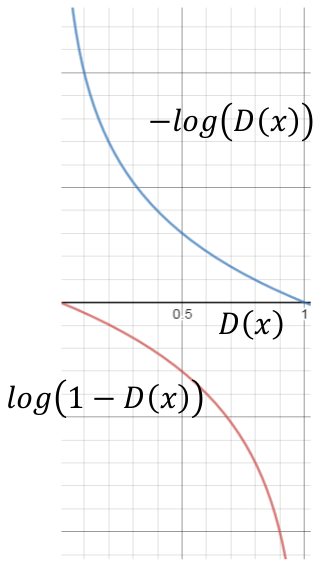
\(\log (1-D(x))\)和\(-\log (D(x))\)的单调性相同,只是下降速度不同。为了迅速收敛,通常采用后者,即:
\[E_{x\sim P_{data}}[\log D(x)]+E_{x\sim P_{G}}[-\log D(x)]\]为了区分,一般把使用\(\log (1-D(x))\)的GAN称为Minimax GAN,而把使用\(-\log (D(x))\)的GAN称为Non-saturating GAN。
Step2
\(G(X,\theta)\)希望它生成的样本越接近真实样本越好,因此这时候把\(\Theta\)固定,只训练\(\theta\)让L越来越小:
\[\begin{aligned}\theta =& \mathop{\arg\min}_{\theta} L_2\\ =&\mathop{\arg\min}_{\theta} \frac{1}{B}\sum_{i=1}^B\left[D\Big(G(x_i,\theta),\Theta\Big)\right]\end{aligned}\tag{4}\]从上面的分析,可以看出相对于监督学习,生成模型G的参数更新不是来自于数据样本本身(不是对数据的似然性进行优化),而是来自于判别模型D的一个反传梯度。
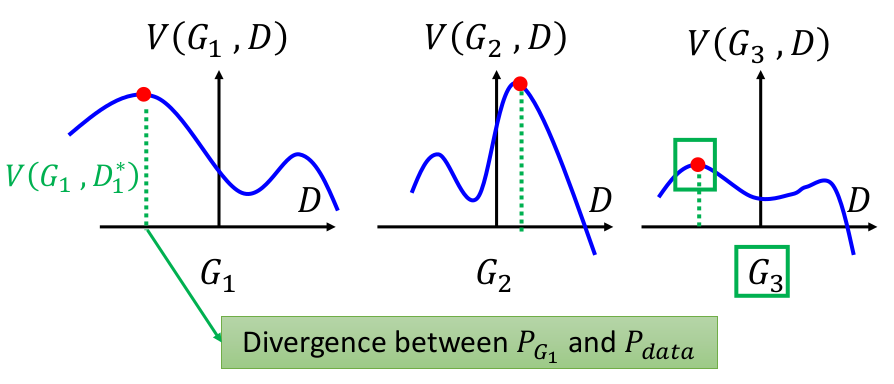
上图展示了GAN的训练步骤:
1.根据Step 1所述,找到3个图中曲线的最高点。
2.根据Step 2所述,选择其中最高点最低的曲线。
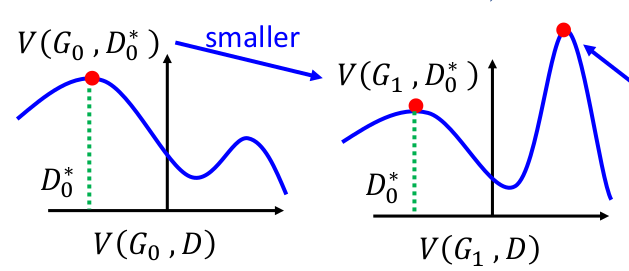
由于\(V(G_0,D_0^*)\)和\(V(G_1,D_0^*)\)的走势不尽相同,前者的下坡有可能是后者的上坡,因此G网络的更新不能太频繁。一般更新D网络k次,更新G网络1次。

您的打赏,是对我的鼓励
