Deep Object Detection » 深度目标检测(八)——其它目标检测网络, 花式IOU, 3D目标检测, 旋转框检测, 小目标检测
2019-06-27 :: 6516 WordsAnchor-Free(续)
参考
https://mp.weixin.qq.com/s/T7DDWvtvCULfjcDmljvx5Q
Anchor-free的对象检测网络汇总
https://zhuanlan.zhihu.com/p/63024247
锚框:Anchor box综述
https://mp.weixin.qq.com/s/dYV446meJXtCQVFrLzWV8A
目标检测中Anchor的认识及理解
https://mp.weixin.qq.com/s/WAx3Zazx9Pq7Lb3vKa510w
目标检测最新方向:推翻固有设置,不再一成不变Anchor
https://zhuanlan.zhihu.com/p/64563186
Anchor free深度学习的目标检测方法
https://mp.weixin.qq.com/s/DoN-vha1H-2lHhbFOaVS8w
FoveaBox:目标检测新纪元,无Anchor时代来临!
https://zhuanlan.zhihu.com/p/66156431
从Densebox到Dubox:更快、性能更优、更易部署的anchor-free目标检测
https://zhuanlan.zhihu.com/p/63273342
聊聊Anchor的”前世今生”(上)
https://zhuanlan.zhihu.com/p/68291859
聊聊Anchor的”前世今生”(下)
https://zhuanlan.zhihu.com/p/62372897
物体检测的轮回:anchor-based与anchor-free
https://mp.weixin.qq.com/s/m_PvEbq2QbTXNmj_gObKmQ
Anchor-free目标检测之ExtremeNet
https://mp.weixin.qq.com/s/LGeNgnXfYaVVAc_37j6-2A
Anchor Free及Transformer时代
https://mp.weixin.qq.com/s/52YBmlHioRkUgetZWHMZOw
Anchor-free目标检测:工业应用更友好的新网络
https://zhuanlan.zhihu.com/p/84398108
目标检测中Anchor的本质分析
https://mp.weixin.qq.com/s/LQOzrlaEOsrsMHj-V8l3hQ
FreeAnchor:抛弃单一的IoU匹配,更自由的anchor匹配方法
https://zhuanlan.zhihu.com/p/163266388
Anchor-free应用一览:目标检测、实例分割、多目标跟踪
https://mp.weixin.qq.com/s/4UEmRcSo0ZGoiLh6iKf_oQ
ATSS:自动选择样本,消除Anchor based和Anchor free物体检测方法之间的差别
https://mp.weixin.qq.com/s/UhHh_DFoxKW5K3OCe3Bjqg
目标检测:Anchor-Free时代
https://mp.weixin.qq.com/s/PqDkdxqvUvSKvTklVojOyA
CPNDet:简单地给CenterNet加入two-stage,更快更强
https://mp.weixin.qq.com/s/7mHhltqDcnYZdHWoRS_EBg
YOLO之外的另一选择,手机端97FPS的Anchor-Free目标检测模型NanoDet现已开源
https://zhuanlan.zhihu.com/p/336016003
OneNet: End-to-End One-Stage Object Detection
https://mp.weixin.qq.com/s/0FPpc2PhLPiE9mg6eRh11Q
OneNet:一阶段的端到端物体检测器,无需NMS
https://mp.weixin.qq.com/s/ov4xLhicTqsce0bG2pw95A
anchor-base和anchor-free差异分析
https://mp.weixin.qq.com/s/yft97xTTX0FUXpyHtI_XMQ
anchor-free存在什么缺点?
其它目标检测网络
A-Fast-RCNN
A-Fast-RCNN首次将对抗学习引入到了目标检测领域,idea在当时是非常创新的。
http://blog.csdn.net/jesse_mx/article/details/72955981
A-Fast-RCNN论文笔记
G-CNN
G-CNN是MaryLand大学的工作,论文主要的思路也是消除region proposal,和YOLO,SSD不同,G-CNN的工作借鉴了迭代的想法,把边框检测等价于找到初始边框到最终目标的一个路径。但是使用one-step regression不能处理这个非线性的过程,所以作者采用迭代的方法逐步接近最终的目标。
http://blog.csdn.net/zijin0802034/article/details/53535647
G-CNN: an Iterative Grid Based Object Detector
D2D
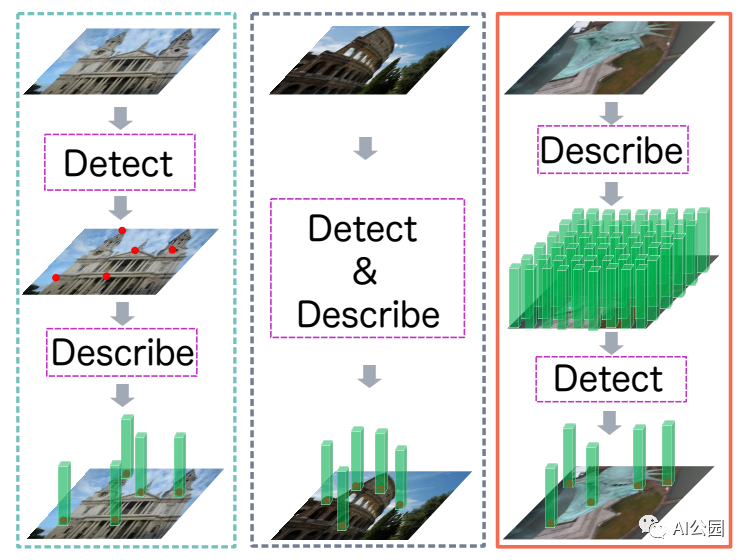
https://mp.weixin.qq.com/s/U15qB2PlQN3qpFBuQiY6RA
Describe-to-Detect(D2D):一种新的特征检测方法
花式IOU
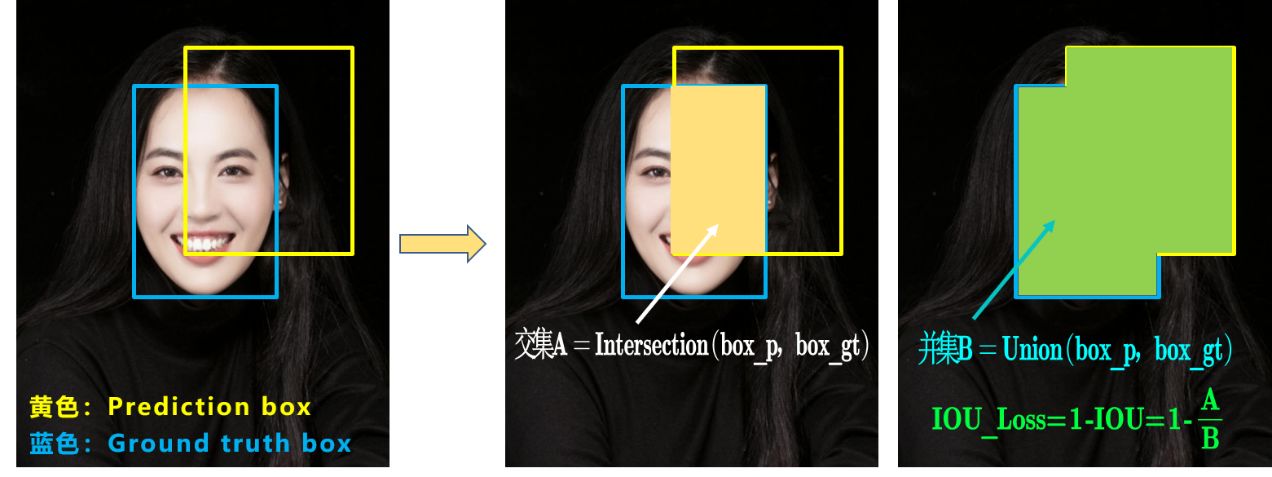
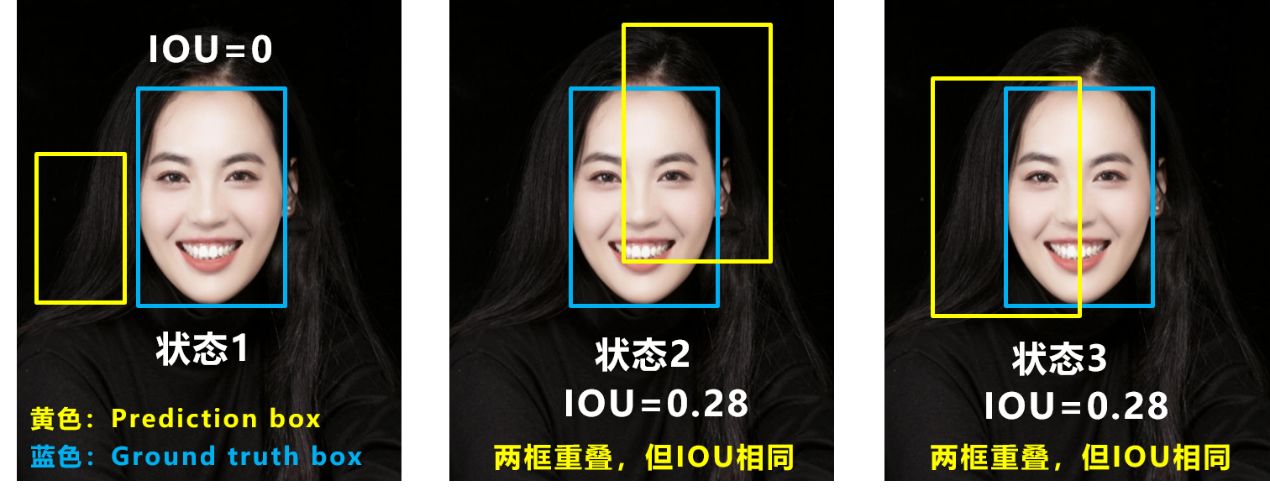
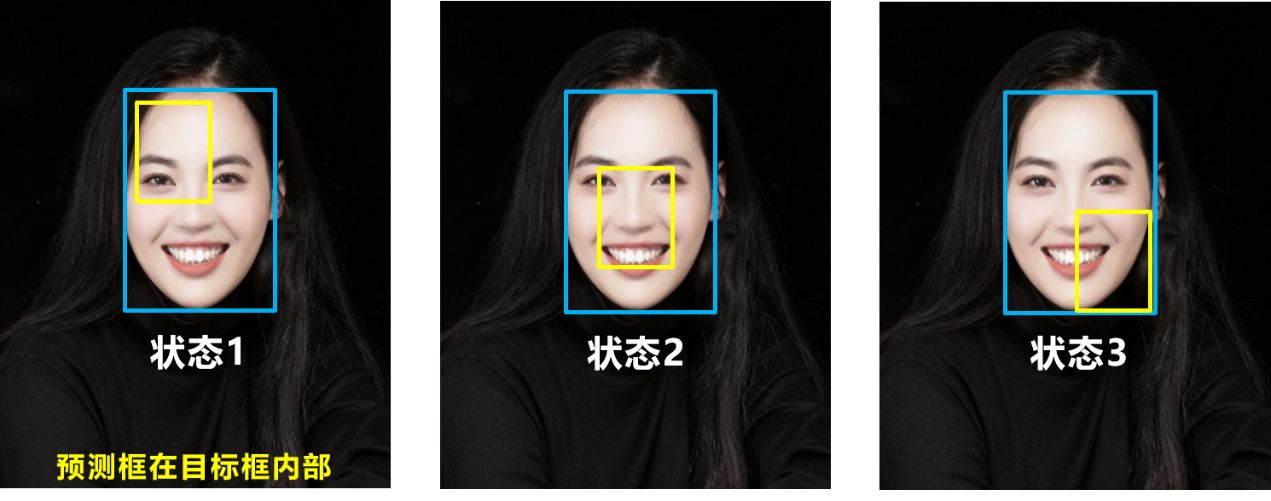
常规IOU存在两个问题:
问题1:即状态1的情况,当预测框和目标框不相交时,IOU=0,无法反应两个框距离的远近,此时损失函数不可导,IOU无法优化两个框不相交的情况。
问题2:即状态2和状态3的情况,当两个预测框大小相同,两个IOU也相同,IOU无法区分两者相交情况的不同。
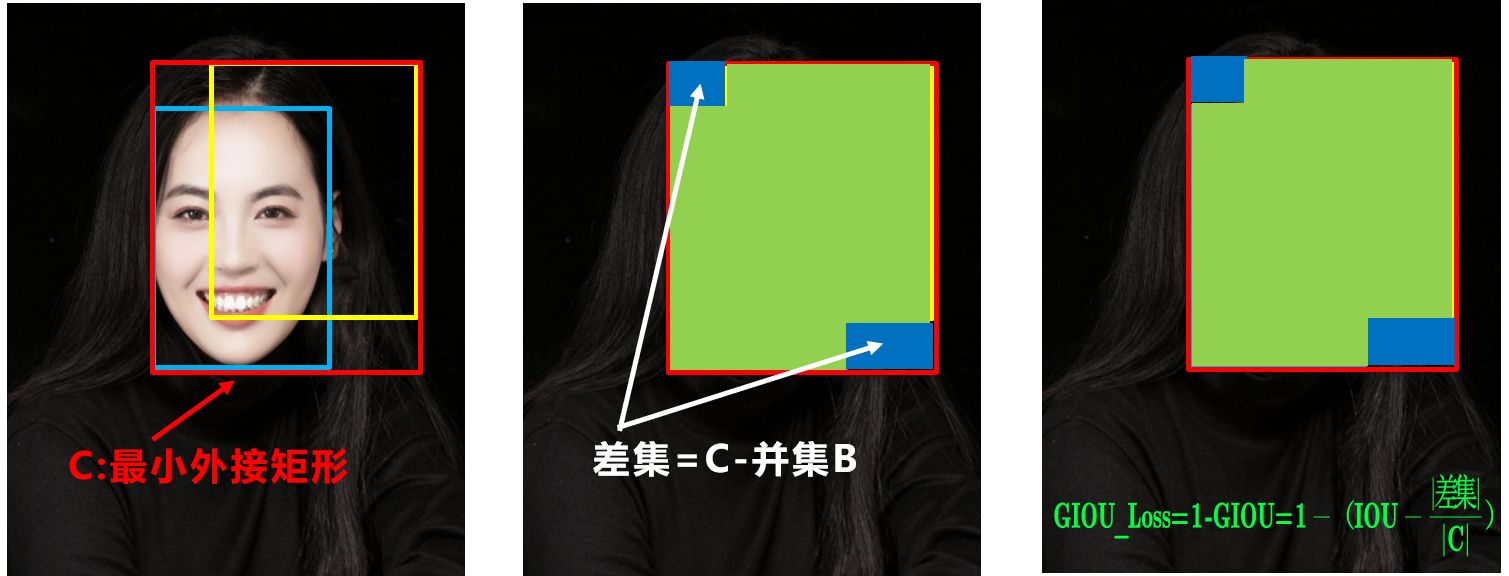
GIOU
问题:状态1、2、3都是预测框在目标框内部且预测框大小一致的情况,这时预测框和目标框的差集都是相同的,因此这三种状态的GIOU值也都是相同的,这时GIOU退化成了IOU,无法区分相对位置关系。
DIOU
好的目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比。
DIOU_Loss考虑了重叠面积和中心点距离,当目标框包裹预测框的时候,直接度量2个框的距离。
但它没有考虑到长宽比。
CIOU
CIOU loss= IOUloss+中心点损失+长宽比例损失
\[CIOU\_ Loss=1-CIOU=1-(IOU-\frac{Distance\_ 2^2}{Distance\_ C^2}-\frac{v^2}{(1-IOU)+v})\] \[v=\frac{4}{\pi^2}(\arctan\frac{w^{gt}}{h^{gt}}-\arctan\frac{w^{p}}{h^{p}})^2\]由于NMS也和IOU有关,所以对应的也有DIOU_nms等。
EIoU & SIoU
EIOU loss =IOUloss+中心点损失+宽损失+长损失
SIoU =Distance cost(angle + distance)+Shape cost+IOU loss
https://zhuanlan.zhihu.com/p/537428926
一文搞懂EIoU与SIoU
参考
https://zhuanlan.zhihu.com/p/57992040
使用GIoU作为检测任务的Loss
https://mp.weixin.qq.com/s/ZbryNlV3EnODofKs2d01RA
目标检测回归损失函数简介:Smooth L1/IoU/GIoU/DIoU/CIoU Loss
https://mp.weixin.qq.com/s/F07Wp-cXIOE4-qdL55WtJQ
基于DIou改进的YOLOv3目标检测
https://mp.weixin.qq.com/s/YeyxuN6RCgF2TcxctXiJQg
使用GIoU作为目标检测新loss
https://mp.weixin.qq.com/s/m8D5uutwlvkQNucFX_TnGw
DIoU和CIoU:IoU在目标检测中的正确打开方式
https://mp.weixin.qq.com/s/VtBfIVj74dhg9HjpxN7rhw
DIoU损失函数详解
https://zhuanlan.zhihu.com/p/109677830
Distance-IoU Loss
https://zhuanlan.zhihu.com/p/94799295
IoU、GIoU、DIoU、CIoU损失函数的那点事儿
https://zhuanlan.zhihu.com/p/342991797
从L1 loss到EIoU loss,目标检测边框回归的损失函数一览
3D目标检测
https://mp.weixin.qq.com/s/bAV74fxvwI73Qt7qm_jPJA
一文读懂深度学习在摄像头和激光雷达融合的3-D目标检测中的应用
https://mp.weixin.qq.com/s/8an3eBrOZ5d6_PdNp6QkyA
一文教你读懂3D目标检测
https://zhuanlan.zhihu.com/p/112836340
谷歌最新论文:从图像中进行3-D目标检测
https://mp.weixin.qq.com/s/DxDkYfzW5BqhidPlqT772Q
从单幅图像到双目立体视觉的3D目标检测算法
https://blog.csdn.net/savant_ning/article/details/69950588
多视图3D目标检测学习笔记
https://mp.weixin.qq.com/s/3JzwA2HAzoWtE_j2UhZCSw
Stereo R-CNN 3D目标检测
https://zhuanlan.zhihu.com/p/58734240
3D Object Detection Overview - 2019
https://mp.weixin.qq.com/s/n3ZUsq2I0CaJ5pIl2nZUFQ
3D目标检测:MonoDIS
https://mp.weixin.qq.com/s/WBiDyIBV9OaKbxUhBml2AA
GS3D(monocular 3D detection)
https://mp.weixin.qq.com/s/G7YNTR8FAsCtkCxLQv1-dQ
Facebook开源3D目标检测框架VoteNet,曾刷新两大数据集最高精度
https://mp.weixin.qq.com/s/s_cAZ–KHvNZq3thrIGx3w
MVX-Net:多模型三位像素网络用于3D目标检测
https://mp.weixin.qq.com/s/ouBxEXcY4s894Sec4ifBtQ
基于YOLO的3D目标检测:YOLO-6D
https://mp.weixin.qq.com/s/yCu5Xx6peDKyU06yBlixpA
首个实时单目3D目标检测算法:RTM3D
https://zhuanlan.zhihu.com/p/101346137
Det3D-首个通用3D目标检测框架
https://zhuanlan.zhihu.com/p/85686290
MLOD:基于鲁棒特征融合方法的多视点三维目标检测
https://mp.weixin.qq.com/s/LN2l67jhivb0hyy6JSLMVA
3D目标检测深度学习方法数据预处理综述
https://mp.weixin.qq.com/s/nGMMb6GHp-BajyfRTN-jDw
不用激光雷达,照样又快又准!3D目标检测之SMOKE
旋转框检测
在真实的场景中,许多时候,我们不仅仅需要找一个“方方正正”的框把物体框起来(英文中,这种框称之为Axis-Aligned),而可能更需要的是能够找一个,“有一些旋转角度的,能够把物体完全的包络起来的框”。
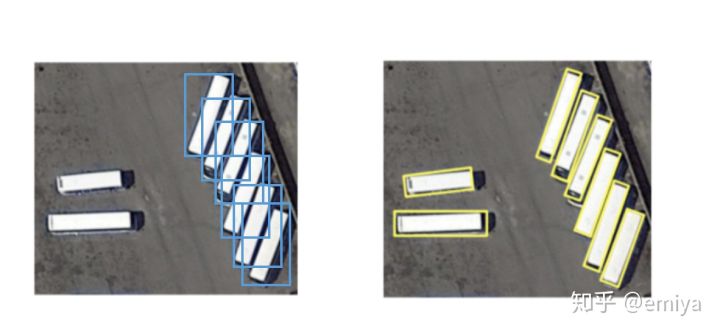
上右图使用水平的检测框从图中将物体扣出,效果会很差,因为:
1、每个检测框中还会同时包含很多其他物体的“一部分”。
2、水平检测框相互之间的IoU值较高,在NMS过程中很容易被抑制掉。
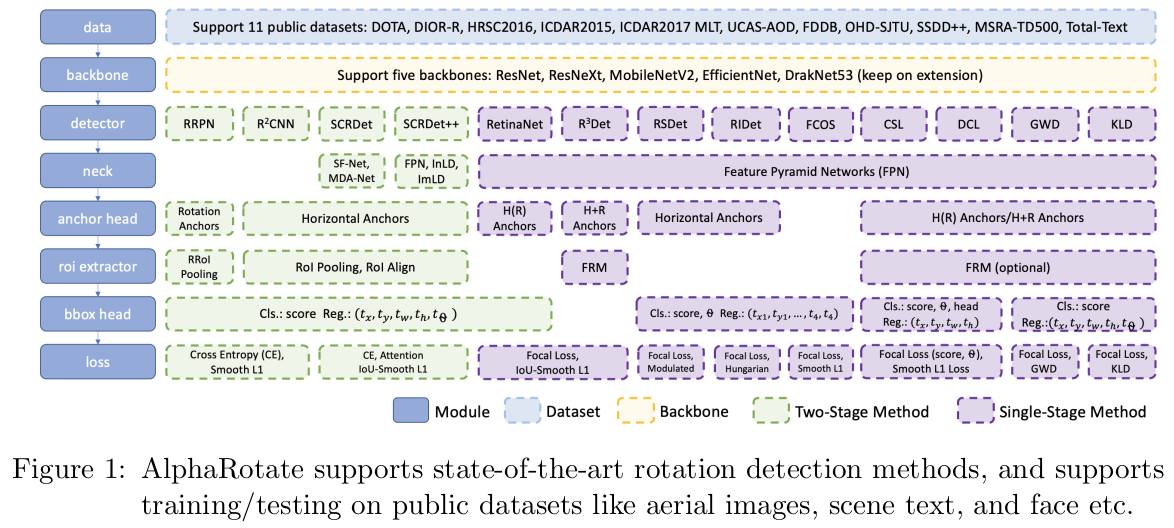
《AlphaRotate: A Rotation Detection Benchmark using TensorFlow》
参考:
https://zhuanlan.zhihu.com/p/105841613
旋转框检测方法综述-FasterRCNN的问题
https://zhuanlan.zhihu.com/p/105881332
旋转框检测方法综述-RotateAnchor系列
https://mp.weixin.qq.com/s/nOBfPFfJMBkkkVEPV0TG0Q
PIoU Loss:倾斜目标检测专用损失函数,公开超难倾斜目标数据集Retail50K
https://mp.weixin.qq.com/s/U8RXvWP7K1xM_tzhdttPfA
BBAVectors:一种Anchor Free的旋转物体检测方法
https://zhuanlan.zhihu.com/p/98703562
旋转目标(遥感/文字)检测方法整理(2017-19年)
https://zhuanlan.zhihu.com/p/163696749
用CenterNet对旋转目标进行检测
https://mp.weixin.qq.com/s/pDjszZk43vuVO6kY3bRczw
ODTK:来自NVIDIA的旋转框物体检测工具箱
https://zhuanlan.zhihu.com/p/337272217
Dynamic Anchor Learning for Object Detection
https://mp.weixin.qq.com/s/Zf6_L9MfKd0AhhgsGSi6EA
旋转目标检测中anchor匹配机制的问题和一些思考
小目标检测
https://mp.weixin.qq.com/s/8k0Mhver2mLnKmV8rVqJHQ
小目标检测相关技巧总结
https://mp.weixin.qq.com/s/svqygu4nFkW4ci7dYMnKsw
小目标检测的数据增广秘籍
https://blog.csdn.net/wq604887956/article/details/83053927
2018小目标检测文章总结
https://mp.weixin.qq.com/s/UQLvHDf62iV8KeZ5LoQdsA
在小目标检测上另辟蹊径的SNIP
https://mp.weixin.qq.com/s/iaeHnfepyeLuOioHqMO9bQ
一种小目标检测中有效的数据增强方法
https://mp.weixin.qq.com/s/UbCLqfyEOKUGnvySweUzMw
使用关键点进行小目标检测
https://mp.weixin.qq.com/s/1v84QyvH-k0lzRPOEyaBgw
我们是如何改进YOLOv3进行红外小目标检测的?
https://mp.weixin.qq.com/s/5TRm1vYx8dYVQHU7FdHdJg
在目标检测中如何解决小目标的问题?
https://mp.weixin.qq.com/s/V9CJVaRYlS5Snyveblb3uw
小目标检测的一些问题,思路和方案
https://mp.weixin.qq.com/s/zvKxi0b-D0fXzx928Wp51A
小目标检测研究进展

您的打赏,是对我的鼓励
