Deep Object Detection » 深度目标检测(七)——CornerNet, CenterNet, Anchor-Free
2019-06-14 :: 5933 WordsCornerNet
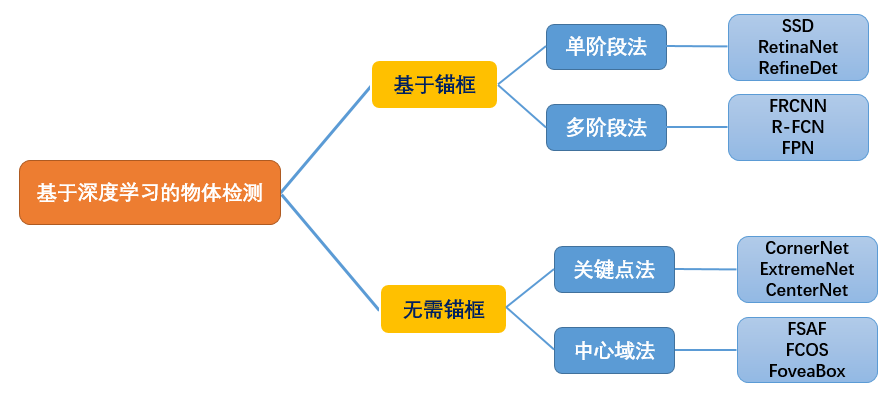
传统的目标检测网络,无论是One-stage还是Two-stage,都有基于Anchor的。Anchor的作用主要在于:显式枚举出不同的scale和aspect ratio的基准bbox。
但就本质而言,框对于物体来说不是一个最好的表示。框的顶点可能甚至都不在物体上,离物体本身已经很远了。
因此,自2018年以来,逐渐有一些不基于anchor的目标检测方法出现,形成了一股Anchor-Free的热潮。下面将首先介绍一下,该类方法的开山之作——CornerNet。
CornerNet并非第一个提出Anchor-Free思想的模型,但却是第一个精度和性能达到与anchor base方法同等水平的Anchor-Free模型。
CornerNet是Princeton University的Hei Law的作品。(2018.8)
论文:
《CornerNet: Detecting Objects as Paired Keypoints》
CornerNet认为Two-stage目标检测最明显的缺点是在Region Proposal阶段需要提取anchor boxes。这样做导致两个问题:
-
提取的anchor boxes数量较多,比如DSSD使用40k,RetinaNet使用100k,anchor boxes众多造成正负样本不均衡。
-
Anchor boxes需要调整很多超参数,比如anchor boxes数量、尺寸、比率,影响模型的训练和推断速率。
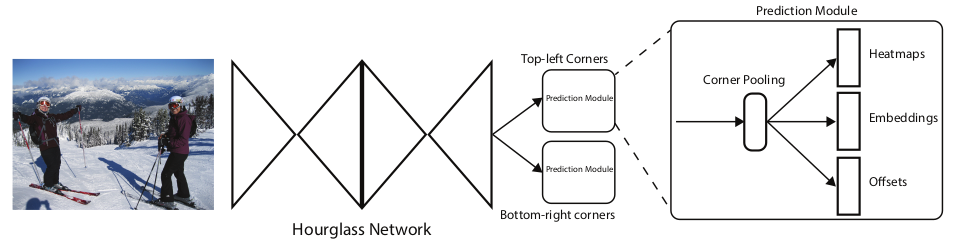
上图是CornerNet的网络结构。可以看出它主要由两部分组成:
Hourglass Network
这是CornerNet的骨干部分。详情参见《深度学习(十二)》。
Bottom-right corners & Top-left Corners Prediction Module
CornerNet堆叠两个Hourglass Network生成Top-left和Bottom-right corners,每一个corners都包括corners Pooling,以及对应的Heatmaps, Embeddings vector和offsets。
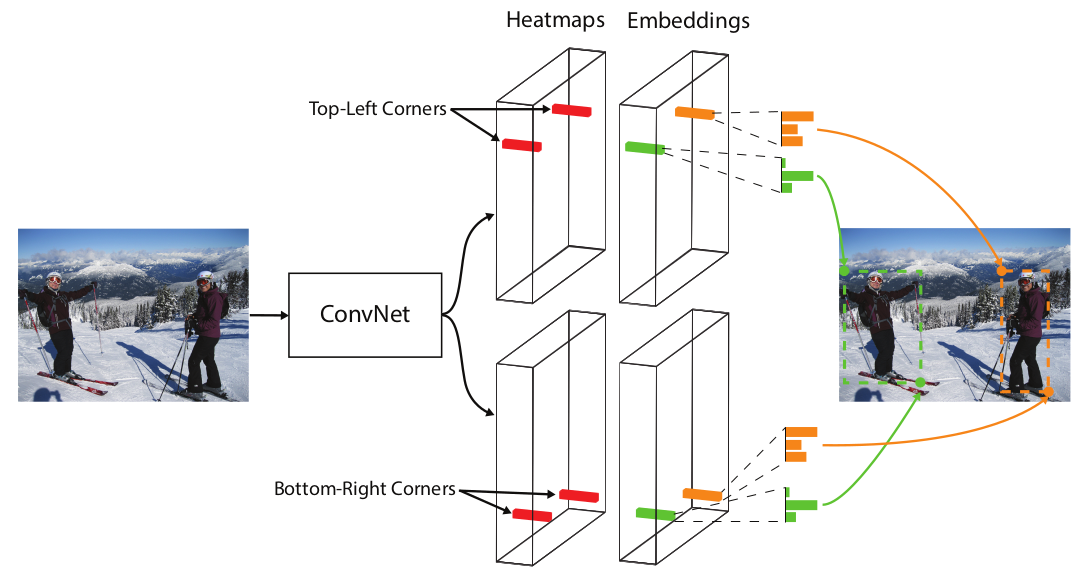
上图是Heatmaps, Embeddings vector的示意图。
-
heatmaps包含C channels(C是目标的类别,没有background channel),每个channel是二进制掩膜,表示相应类别的顶点位置。
-
embedding vector使相同目标的两个顶点(左上角和右下角)距离最短。或者也可以反过来说,两个顶点的embedding vector越相近,则它们越有可能配对。
-
offsets用于调整生成更加紧密的边界定位框。
corner pooling
corner pooling是CornerNet新提出的一种操作。其步骤如下图所示:
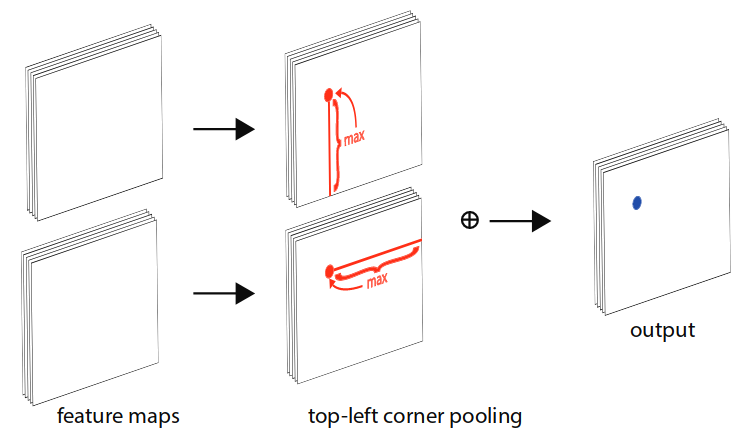
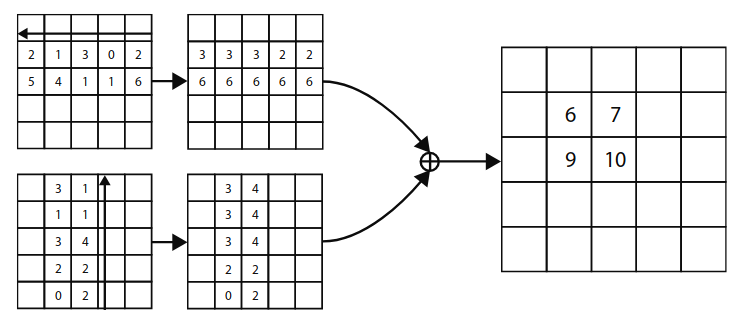
依top-left corner pooling为例,对每个channel,分别提取特征图的水平和垂直方向的最大值,然后求和。具体的计算如下图所示:
论文认为corner pooling之所以有效,是因为:
-
目标定位框的中心难以确定,和边界框的4条边相关,但是每个顶点只与边界框的两条边相关,所以corner更容易提取。
-
顶点更有效提供离散的边界空间,使用\(O(w\times h)\)顶点可以表示\(O(w^2\times h^2)\)个anchor boxes。
参考
https://mp.weixin.qq.com/s/e74-zFcMZzn67KaFXb_fdQ
CornerNet目标检测开启预测“边界框”到预测“点对”的新思路
https://zhuanlan.zhihu.com/p/41865617
CornerNet:目标检测算法新思路
https://mp.weixin.qq.com/s/e6B22xpue_xZwrXmIlZodw
ECCV-2018最佼佼者CornerNet的目标检测算法
https://mp.weixin.qq.com/s/9ldLaYKGkgq-MnJZw7CrDQ
CornerNet为什么有别于其他目标检测领域的主流算法?
https://mp.weixin.qq.com/s/ZhfnZ4IwOnTQlqeB6Ilr3A
CornerNet: Detecting Objects as Paired Keypoints解读
https://zhuanlan.zhihu.com/p/63134919
普林斯顿大学提出:CornerNet-Lite,基于关键点的目标检测算法,已开源!
https://mp.weixin.qq.com/s/8hN1RdYVJQWOqPpejjfXeQ
CornerNet
https://mp.weixin.qq.com/s/X1FCnSIr-iMwU9Sessxkfw
CentripetalNet:更合理的角点匹配,多方面改进CornerNet
CenterNet
CenterNet是中科院、牛津、Huawei Noah’s Ark Lab的一个联合团队的作品。(2019.4)
论文:
《CenterNet: Keypoint Triplets for Object Detection》
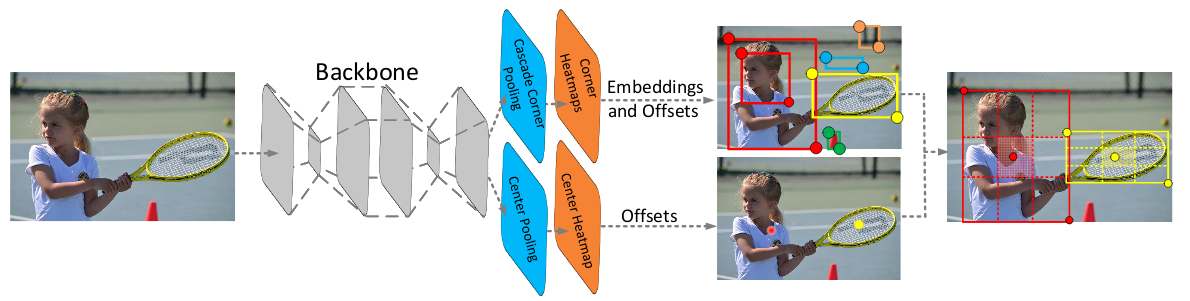
上图是CenterNet的网络结构图。
正如之前提到的,框对于物体来说不是一个最好的表示。同理,Corner也不是什么特别好的表示:绝大多数情况下,Corner同样是远离物体的。
也正是由于Corner和物体的关联度不大,CornerNet才发明了corner pooling操作,用以提取Corner。
但是即使这样,由于没有anchor的限制,使得任意两个角点都可以组成一个目标框,这就对判断两个角点是否属于同一物体的算法要求很高,一但准确度差一点,就会产生很多错误目标框。
有鉴于此,CenterNet除了Corner之外,还添加了Center的预测分支,也就是上图中的center pooling+center heatmap。这主要基于以下假设:如果目标框是准确的,那么在其中心区域能够检测到目标中心点的概率就会很高,反之亦然。
因此,首先利用左上和右下两个角点生成初始目标框,对每个预测框定义一个中心区域,然后判断每个目标框的中心区域是否含有中心点,若有则保留该目标框,若无则删除该目标框。
为了和CornerNet做比较,CenterNet同样使用了Hourglass Network作为骨干网络。并针对中心点和角点的提取,提出了Center pooling和Cascade corner pooling操作。这里不再赘述。
除此之外,下面的这篇论文提出的网络也叫CenterNet,思路也是类似的:
《Objects as Points》
参考:
https://mp.weixin.qq.com/s/wWqdjsJ6U86lML0rSohz4A
CenterNet:将目标视为点
https://zhuanlan.zhihu.com/p/62789701
中科院牛津华为诺亚提出CenterNet,one-stage detector可达47AP,已开源!
https://mp.weixin.qq.com/s/CEcN5Aljvs7AyOLPRFjUaw
真Anchor Free目标检测—CenterNet详解
https://mp.weixin.qq.com/s/7lwEn49G-3RDnBKBv5c7Ag
论文也撞衫,你更喜欢哪个无锚点CenterNet?
https://mp.weixin.qq.com/s/lE_HoLUfz8ehNmuj0fmstg
PyTorch版CenterNet训练自己的数据集
https://mp.weixin.qq.com/s/MZDtlZogXvgYNqlmc87LYg
CenterNet的骨干网络之DLASeg
https://mp.weixin.qq.com/s/CcUlqZA2KG5P42sCpsj94g
CenterNet之loss计算代码解析
https://mp.weixin.qq.com/s/Vu_qfJkM36v7f8VQPLCU6w
Objects as Points:预测目标中心,无需NMS等后处理操作
Anchor-Free
在前面的章节,我们已经简要的分析了Anchor Free和Anchor Base模型的差异,并介绍了两个Anchor-Free的模型——CornerNet和CenterNet。
这里对其他比较重要的Anchor-Free模型做一个简单介绍。
ExtremeNet
ExtremeNet是UT Austin的Xingyi Zhou的作品。(2019.1)
论文:
《Bottom-up Object Detection by Grouping Extreme and Center Points》
代码:
https://github.com/xingyizhou/ExtremeNet
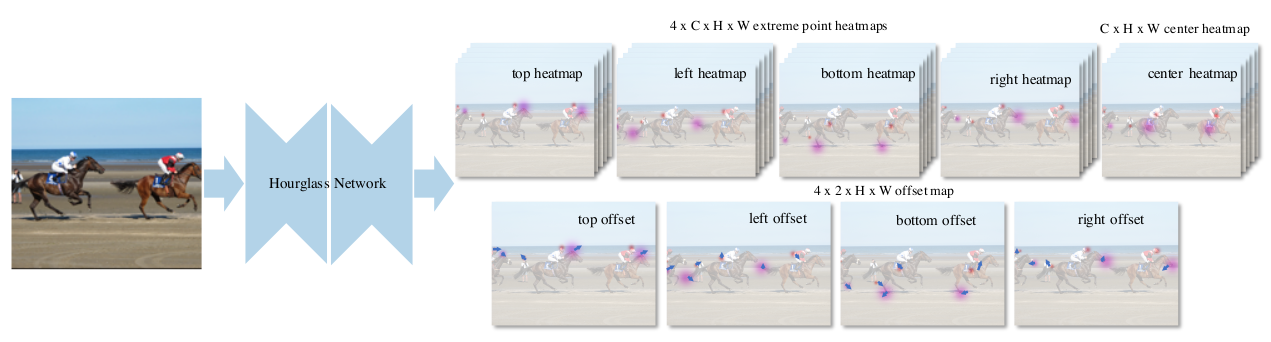
上图是ExtremeNet的网络结构图。它预测是关键点就不光是角点和中心点了,事实上它预测了9个点。具体的方法和CenterNet类似,也是heatmap抽取关键点。
显然,这类关键点算法是受到人脸/姿态关键点算法的启发,因此它们采用Hourglass Network作为骨干网络也就顺理成章了,后者正是比较经典的关键点算法模型之一。
FoveaBox
论文:
《FoveaBox: Beyond Anchor-based Object Detector》
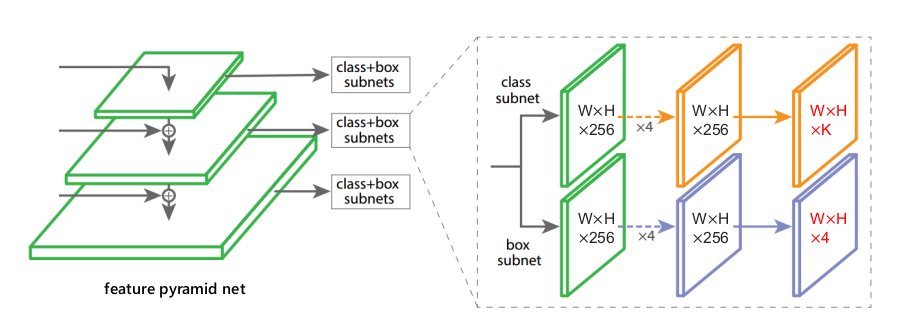
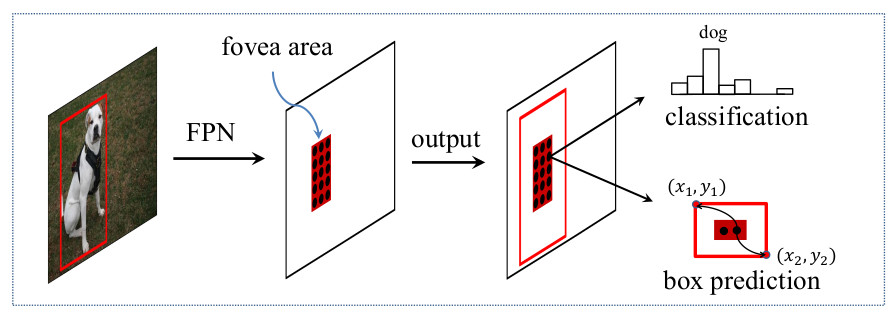
上两图是FoveaBox的网络结构图。
它的主要思路是:直接学习目标存在的概率和目标框的坐标位置,其中包括预测类别相关的语义图和生成类别无关的候选目标框。
事实上这和YOLOv1的思路是一致的。但FoveaBox比YOLOv1精度高,主要在于FPN提供了多尺度的信息,而YOLOv1只有单尺度的信息。
此外,Focal loss也是Anchor-Free模型的常用手段。
FCOS
《FCOS: Fully Convolutional One-Stage Object Detection》
https://zhuanlan.zhihu.com/p/62198865
最新的Anchor-Free目标检测模型FCOS,现已开源!
https://mp.weixin.qq.com/s/N93TrVnUuvAgfcoHXevTHw
FCOS: 最新的one-stage逐像素目标检测算法
https://mp.weixin.qq.com/s/ebTbbo-IeqyzDqSn2bgjsQ
带你捋一捋anchor-free的检测模型:FCOS
https://zhuanlan.zhihu.com/p/156112318
FCOS算法的原理与实现
https://mp.weixin.qq.com/s/Q-DSG-ZAW0z0X6LHDLmFFA
FCOS:全卷积一阶段Anchor Free物体检测器,多种视觉任务的统一框架
https://mp.weixin.qq.com/s/5YIBEmDAevosxEs-jRJNVg
anchor-free的回归之作:FCOS
总结
对于基于anchors的目标检测器,为了获得最优的检测性能,需要在训练前进行聚类分析来确定一组最优锚点,但是这也带来了一些问题:
- 聚类得到的锚框一般只能用在该数据集上,并不是通用的;
- 锚框增加了检测头的复杂度以及生成结果的数量。
Anchor-free机制显著减少了需要启发式调整的设计参数的数量和涉及的许多技巧(例如,锚定群集、网格敏感)。使得检测器,特别是其训练和解码阶段变得相当简单。
Anchor-Free模型主要是为了解决Two-stage模型运算速度较慢的问题而提出的,因此它们绝大多数都是One-stage模型。
从目前的效果来看,某些Anchor-Free模型其精度已经接近Two-stage模型,但运算速度相比YOLOv3等传统One-stage模型,仍有较大差距,尚无太大的实用优势(可以使用,但优势不大)。
其他比较知名的Anchor-Free模型还有:
- FSAF
《Feature Selective Anchor-Free Module》
- DenseBox
《DenseBox: Unifying Landmark Localization and Object Detection》
Sparse R-CNN
https://zhuanlan.zhihu.com/p/310058362
Sparse R-CNN
https://mp.weixin.qq.com/s/wLESASiP3hofrDKH7yk1aA
Sparse R-CNN: 在dense(单阶段),dense2sparse(二阶段)之外的另一种物体检测模式
https://mp.weixin.qq.com/s/LRSY2YsZGB_Vye7EbvhXpA
Sparse R-CNN: 稀疏的目标检测,武装Fast RCNN
RepPoints
https://mp.weixin.qq.com/s/aWv7_yiX5BFKpL21SRV1MQ
RepPoints:可形变卷积的进阶
https://mp.weixin.qq.com/s/nI_3kilFCsDHhtjFhRKytA
RepPoints:替代边界框,基于点集的物体表示新方法
https://mp.weixin.qq.com/s/VTb6CUOWnPpyU6WnYdYJ-g
RepPoints V2:将角点检测和前景热图引入纯回归目标检测算法
https://mp.weixin.qq.com/s/gnTZ-q2-lm8QPH6JEPylnw
RepPointv2:使用点集合表示来做目标检测

您的打赏,是对我的鼓励
