ML » 机器学习(三十五)——PID算法, Probabilistic Robotics, Kalman filters
2018-02-22 :: 6273 WordsPID算法
PID算法是自动控制领域最基础应用也最广泛的算法。它是三个单词proportional(P,比例)、integral(I,积分)和differential(D,微分)的缩写。
PID算法的流程如下图所示:
| 图1 |
|---|
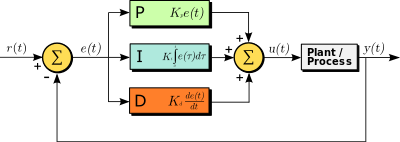 |
以下我们以水箱水龙头为例,解释一下PID算法的各个要素。
场景1:假设我们面对的系统是一个简单的水箱的液位,要从空箱开始注水直到达到某个高度,而你能控制的变量是注水龙头的开关大小。
图1中的\(r(t)\)表示期待的设定值,在这个场景中,就是水箱的液位。\(y(t)\)表示当前的液位。\(e(t)=r(t)-y(t)\)表示误差值。
针对这个场景,我们可以设计如下算法:
水箱液位离预定高度远的时候开关开大点,离的近的时候开关就开小点,随着液位逐步接近预定高度逐渐关掉水龙头。用数学表示就是:
\[u(t) = K_\text{p} e(t)\tag{1}\]上式中的\(u(t)\)表示需要控制的量,在这里就是水龙头的开合度。\(K_\text{p}\)被称为比例系数。
场景2:假设这个水箱不仅仅是装水的容器了,还需要持续稳定的给用户供水。
以下用c表示给用户供水的量(\(c\ge 0\))。显然如果使用公式1,则系统稳定时,\(u(t)-c=0\),即\(K_\text{p} e(t)=c\)。
由于c和\(K_\text{p}\)都不为0,因此\(e(t)\)也不为0,这就导致始终无法加注到指定水位。这种稳态误差被称为静差。
为了平衡c,我们修改算法为:
\[u(t) = K_\text{p} e(t) + K_\text{i} \int_0^t e(\tau) \,d\tau\tag{2}\]\(K_\text{i}\)被称为积分系数。积分环节的意义就相当于你增加了一个水龙头,这个水龙头的开关规则是水位比预定高度低就一直往大了拧,比预定高度高就往小了拧。如果漏水速度不变,那么总有一天这个水龙头出水的速度恰好跟漏水的速度相等了,系统就和第一小节的那个一样了。那时,静差就没有了。这就是所谓的积分环节可以消除系统静差。
场景3:假设用户的用水量是变化的,即\(c(t)\)。
这时,如果仍采用公式2,则由于\(c(t)\)的变化,导致\(e(t)\)不恒为0。为了减小\(c(t)\)的变化,对\(e(t)\)的影响,我们继续修改算法:
\[u(t) = K_\text{p} e(t) + K_\text{i} \int_0^t e(\tau) \,d\tau + K_\text{d} \frac{de(t)}{dt}\tag{3}\]\(K_\text{d}\)被称为微分系数。由于\(c(t)\)的变化不可能事先得知,因此,微分环节只能减小\(c(t)\)的变化所造成的影响,而不能消除。
公式3在Laplace域可写做:
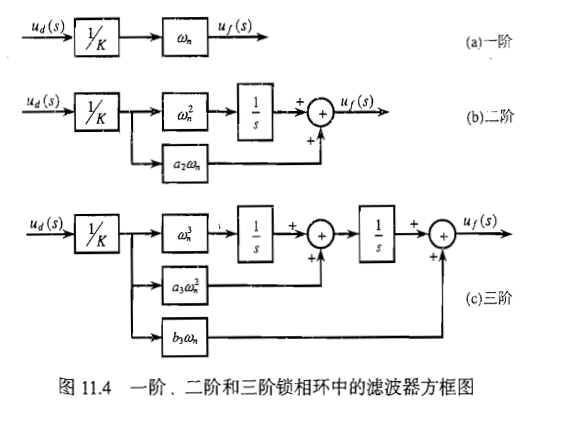
\[L(s) = K_\text{p} + K_\text{i}/s + K_\text{d} s\tag{4}\]从公式4可以看出,PID controller的数学原理和锁相环(Phase-locked loop)非常类似,它们实际上都是Feedback Control系统。
反馈控制最重要的就是两点:
一是反馈;
二是测量的大方向。
只要有反馈的结构在,只要测量的反馈值正负号不搞错,那其他的都只是细枝末节的问题了。
https://www.zhihu.com/question/47755808
常用控制算法(包括PID和卡尔曼滤波等)各有什么天然的局限乃至缺陷?
串级PID控制
实际使用中,为了改善PID控制的效果,一般还会用到串级PID控制。
参考:
https://blog.csdn.net/qq_25005909/article/details/77941243
串级PID控制四轴飞行状态-分析
https://blog.csdn.net/nemol1990/article/details/45131603
四轴PID讲解
https://www.zhihu.com/question/293450508
飞控算法中双环串级PID如何理解?
参考
https://en.wikipedia.org/wiki/PID_controller
《Feedback Control of Dynamic Systems》,Gene F. Franklin,J David Powell,Abbas Emami-Naeini著。
Gene F. Franklin,1927~2012,美国控制论学家。哥伦比亚大学博士,斯坦福大学教授。
J David Powell,美国航空航天学家。斯坦福大学博士和教授。
Abbas Emami-Naeini,斯坦福大学博士和讲师,SC Solutions公司总监。
https://www.zhihu.com/answer/23942834
如何通俗地解释PID参数整定?
https://zhuanlan.zhihu.com/p/35473808
PID控制器的贝叶斯理解
https://zhuanlan.zhihu.com/p/139244173
广告出价–如何使用PID控制广告投放成本
https://zhuanlan.zhihu.com/p/39573490
PID控制算法原理
https://mp.weixin.qq.com/s/4iX1hB_f8zQYrG0EQ2u3wA
PID算法在广告成本控制领域的应用
https://mp.weixin.qq.com/s/__xvATWhggYXLy92dz9L5Q
广告成本控制-PID算法
https://mp.weixin.qq.com/s/fswZL2qhgErccYB1GuXZ8g
PID微分器与滤波器的爱恨情仇
https://mp.weixin.qq.com/s/vsyEM7z7-tKrXwRPjE5-EA
浅谈PID控制对无人车/船的自动驾驶影响及水信无人船PID调试结果展示
Probabilistic Robotics
这篇心得主要根据Sebastian Thrun的Probabilistic Robotics课程的ppt来写。
Sebastian Thrun,德国波恩大学博士(1995年)。先后执教于CMU和Stanford。
网址:
http://robots.stanford.edu/probabilistic-robotics/ppt/
贝叶斯过滤器
假定我们需要根据测量值z来判断门的开关。显然,这里的\(P(open\mid z)\)是诊断式(diagnostic)问题,而\(P(z\mid open)\)是因果式(causal)问题。通常来说,后者比较容易获取,而前者可以基于后者使用贝叶斯公式计算得到。
一般将\(P(z\mid x)\)称为Sensor model。
针对多相关测量值问题,这里有一个和朴素贝叶斯假设相仿的Markov assumption——假设\(z_n\)独立于\(z_1,\dots,z_{n-1}\)(即“现在”不依赖于“过去”),则:
\[\begin{array}\\ P(x\mid z_1,\dots,z_n)=\frac{P(z_n\mid x)P(x\mid z_1,\dots,z_{n-1})}{P(z_n\mid z_1,\dots,z_{n-1})}(\text{Bayes})\\ =\eta P(z_n\mid x)P(x\mid z_1,\dots,z_{n-1})=\eta_{1,\dots,n}\prod_{i=1}^nP(z_i\mid x)P(x)(\text{Markov}) \end{array}\]以下的推导过程注释中,如无特别说明。均以Bayes指代Bayes’ theorem,以Markov指代Markov assumption。
上式中的\(\eta\)表示概率的归一化系数。
除了测量值z之外,一般的控制系统中还有动作(Action)的概念。比如打开门就是一个Action。Action会导致系统的状态发生改变(也可不变)。如下图所示:
![]()
通常,将\(P(x\mid u,x')\)称作Action Model。其中,u表示Action,而x’表示系统的上一个状态。
一般的,新的测量值会减少系统的不确定度,而新的Action会增加系统的不确定度。
综上,一个贝叶斯过滤器(Bayes Filters)的框架包括:
输入:
1.观测值z和Action u的序列:\(d_t=\{u_1,z_1,\dots,u_t,z_t\}\)
2.Sensor model:\(P(z\mid x)\)
3.Action model:\(P(x\mid u,x')\)
4.系统状态的先验概率:\(P(x)\)
输出:
1.估计动态系统的状态X。
2.状态的后验概率,也叫Belief:
\[\begin{align} \mathbf{Bel(x_t)}&=P(x_t\mid u_1,z_1,\dots,u_t,z_t) \\&=\eta P(z_t\mid x_t,u_1,z_1,\dots,u_t)P(x_t\mid u_1,z_1,\dots,u_t)(\text{Bayes}) \\&=\eta P(z_t\mid x_t)P(x_t\mid u_1,z_1,\dots,u_t)(\text{Markov}) \\&=\eta P(z_t\mid x_t)\int P(x_t\mid u_1,z_1,\dots,u_t,x_{t-1})P(x_{t-1}\mid u_1,z_1,\dots,u_t)\mathrm{d}x_{t-1}(\text{Total prob.}) \\&=\eta P(z_t\mid x_t)\int P(x_t\mid u_t,x_{t-1})P(x_{t-1}\mid u_1,z_1,\dots,u_t)\mathrm{d}x_{t-1}(\text{Markov}) \\&=\eta P(z_t\mid x_t)\int P(x_t\mid u_t,x_{t-1})P(x_{t-1}\mid u_1,z_1,\dots,z_{t-1})\mathrm{d}x_{t-1}(\text{Markov}) \\&=\eta P(z_t\mid x_t)\int P(x_t\mid u_t,x_{t-1})\mathbf{Bel(x_{t-1})}\mathrm{d}x_{t-1} \end{align}\]上式也可以写作:
预测:
\[\overline{\mathbf{Bel(x_t)}}=\int P(x_t\mid u_t,x_{t-1})\mathbf{Bel(x_{t-1})}\mathrm{d}x_{t-1}\]修正:
\[\mathbf{Bel(x_t)}=\eta P(z_t\mid x_t)\overline{\mathbf{Bel(x_t)}}\]熟悉卡尔曼滤波的同学大概已经看出来了。没错!贝叶斯过滤器是一大类算法的统称。这些算法包括Kalman filters、Particle filters、Hidden Markov models、Dynamic Bayesian networks、Partially Observable Markov Decision Processes (POMDPs)等。
递归最小二乘法
Recursive Least Squares
http://www.doc88.com/p-6836102414531.html
RLS自适应算法基本原理
https://blog.csdn.net/HJ199404182515/article/details/52504150
浅谈自适应滤波器
零点 & 极点
John Doyle举过一个很直观的例子: 把一根杆立在手上,保持不倒。
杆越长就越容易。杆的长度会影响极点的位置,杆越短的话极点越不稳定。
一般人做这个实验的时候是眼睛看杆的顶端。如果眼睛只盯着杆的中心,这个任务也会变得非常难。原因是因为零点的位置,导致杆的状态变得不可观。
控制系统中的零极点有什么物理意义么?
Kalman filters
Rudolf (Rudi) Emil Kálmán,1930~2016,匈牙利出生的美国科学家。哥伦比亚大学博士(1957),先后执教于斯坦福大学和佛罗里达大学。现代控制理论的里程碑人物,美国科学院院士。
卡尔曼滤波从纯数学的角度讲,并没有多大意义。因此,主流数学家们在很长一段时间内,并不承认Kálmán是数学家。只是由于卡尔曼滤波在工程界的巨大影响力,才不得不于2012年,授予其美国数学协会院士。
| 名称 | 使用场景 |
|---|---|
| Kalman filters | Linear Gaussian |
| Extended Kalman filter | Nonlinear Gaussian |
| Iterated EKF | Nonlinear Gaussian |
| Unscented Kalman filters | Nonlinear Gaussian |
| Particle filter | Nonlinear Non-Gaussian |
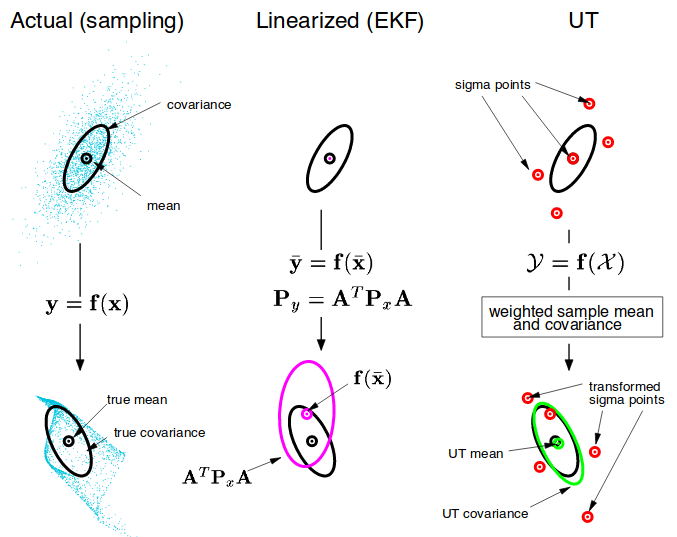
unscented transformation
参考:
http://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf
Gregory Francis Welch写的卡尔曼滤波科普文。
Gregory Francis Welch,北卡罗莱娜大学博士(1997)。中佛罗里达大学教授。
http://www.cs.unc.edu/~welch/kalman/media/misc/kalman_intro_chinese.zip
上文的中文版。
https://zhuanlan.zhihu.com/p/21294526
知乎诸位大神的科普文。
http://www.docin.com/p-976961701.html
动态相对定位中自适应滤波方法的研究
《自适应动态导航定位》,杨元喜著。
杨元喜,1956年生,大地测量学家。中国科学院院士。
https://zhuanlan.zhihu.com/c_1131936304564453376
专栏:现代控制理论
https://zhuanlan.zhihu.com/ClassicControl
专栏:经典控制理论
https://blog.csdn.net/tiandijun/article/details/72469471
通俗理解卡尔曼滤波及其算法实现

您的打赏,是对我的鼓励
