ML » 机器学习(三十一)——MRF, CRF
2018-01-09 :: 4847 WordsHMM
前向算法(续)
穷举法的计算量太大,不适用于计算较长的马尔可夫链。但是我们可以观察一下穷举法的计算步骤。
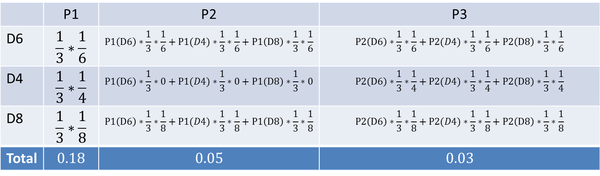
上图是某骰子序列的穷举计算过程,可以看出第3步计算的概率和公式的某些项,实际上在之前的步骤中已经计算出来了,前向递推的计算量并没有想象中的大。
Baum–Welch算法
Baum–Welch算法是求解问题3的常用算法,由Baum和Welch于1972年提出。它虽然是EM算法的一个特例,但后者却是1977年才提出的。
Leonard Esau Baum,1931~2017,美国数学家,哈佛博士(1958)。国防分析研究所研究员,70年代末,加盟对冲基金——文艺复兴科技公司。
Lloyd Richard Welch,生于1927年,美国数学家,加州理工博士(1958),南加州大学教授。美国工程院院士,Shannon Award获得者(2003)。
Baum–Welch算法也叫前向后向算法。因为它包含了前向和后向两个步骤。
-
expectation:计算隐变量的概率分布,并得到可观察变量与隐变量联合概率的log-likelihood在前面求得的隐变量概率分布下的期望。这个步骤就是所谓的前向步骤,算法和求解问题2的forward算法是一致的
-
maximization:求得使上述期望最大的新的模型参数。若达到收敛条件则退出,否则回到步骤1。
前向后向算法则主要是解决Expectation这步中求隐变量概率分布的一个算法,它利用dynamic programming大大减少了计算量。
此外,训练HMM模型时,也需要对模型参数进行随机初始化,不然和神经网络一样,由于参数没有差异性,而无法进行训练。
参考:
https://blog.csdn.net/xmu_jupiter/article/details/50965039
HMM的Baum-Welch算法和Viterbi算法公式推导细节
HMM在NLP领域的应用
具体到分词系统,可以将“标签”当作隐含状态,“字或词”当作可见状态。那么,几个NLP的问题就可以转化为:
词性标注:给定一个词的序列(也就是句子),找出最可能的词性序列(标签是词性)。如ansj分词和ICTCLAS分词等。
分词:给定一个字的序列,找出最可能的标签序列(断句符号:[词尾]或[非词尾]构成的序列)。结巴分词目前就是利用BMES标签来分词的,B(开头),M(中间),E(结尾),S(独立成词)
命名实体识别:给定一个词的序列,找出最可能的标签序列(内外符号:[内]表示词属于命名实体,[外]表示不属于)。如ICTCLAS实现的人名识别、翻译人名识别、地名识别都是用同一个Tagger实现的。
综上,在监督学习中,一般把训练数据当作HMM的可见状态,而把标签当作隐含状态。当然这里的标签一般是生成最终训练标签的一个概率模型的参数。
如果标签不是概率模型的,而是已知确定的话,那么就退化为普通的逻辑回归,直接用极大似然估计即可。
正由于标签是概率模型的,存在一个建模的过程,因此HMM实际上是一种生成模型算法。
HMM只遵循了一阶马尔科夫假设,即1-gram。如果数据的依赖超过1-gram,则不能使用HMM,而需要使用高阶HMM。
参考:
http://blog.sina.com.cn/s/blog_8267db980102wq4l.html
HMM识别新词
https://mp.weixin.qq.com/s/eGx0PHvZXwmykUon-9M-mQ
HMM模型在贝壳对话系统中的应用
https://www.cnblogs.com/en-heng/p/6183522.html
二阶隐马尔可夫模型2-HMM
MRF
前文已经指出无向的概率图模型也叫做Markov Random Field。
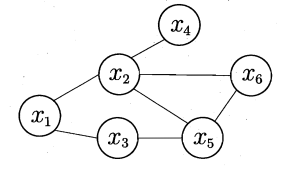
上图是一个简单的MRF的示意图。无向图的边没有箭头,表示变量之间是相互依赖的。
对于图中结点的一个子集,若其中任意两结点间都有边连接,则称该结点子集为一个团(clique)。
若在一个团中,加入另外任何一个结点都不能形成团,则称该团为极大团(maximal clique)。
上图中,\(\{x_5,x_6\}\)是团,\(\{x_2,x_5,x_6\}\)是极大团,而\(\{x_1,x_2,x_3\}\)不是团,因为\(x_2,x_3\)之间没有连接。
从团的定义可以看出:
-
无法组团的两个结点之间由于没有依赖关系,因此是相互独立的。
-
每个结点至少出现在一个极大团中。孤立结点的极大团就是它本身。
-
若Q不是一个极大团,则必有极大团Q*包含Q。
基于以上性质,我们效仿整数的因子分解,提出了概率图的极大团分解:
\[P(x)=\frac{1}{Z^*}\prod_{Q\in C^*}\psi_Q(x_Q)\tag{1}\]其中,\(\psi_Q\)为Q对应的势函数。
\[Z^*=\sum_x \prod_{Q\in C^*} \psi_Q(x_Q)\]\(Z^*\)通常被称为规范化因子,用于使输出符合概率的定义(部分概率\(\le 1\),全概率\(=1\))。
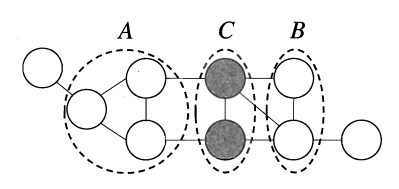
如上图所示,结点集A中的结点到B中的结点,必须经过C中的结点,则称A和B被C分离,C称为分离集(separating set)。
显然,A和B由于没有直接关系,因此是相对于C条件独立的。这就是所谓的global Markov property。即:
\[P(x_A,x_B|x_C)=P(x_A|x_C)P(x_B|x_C)\]从结点间的连通性上,还可得以下术语:
马尔可夫毯(Markov Blanket, MB):有向图——结点A的父结点+A的子结点+A的子结点的其他父结点。如下图所示:
![]()
无向图——结点A的邻接结点。
和global Markov property类似,还有local Markov property:给定某变量的邻接变量,则该变量条件独立于其他变量。
MEMM
Maximum Entropy Markov Model是一种判别模型。它和HMM的联系和区别主要表现在以下方面:
- 生成 vs 判别
正如《机器学习(三)》中提到的,MEMM既然是判别模型,那它实际上就是一个确定决策边界的分类问题。分类问题使用Maximum Entropy建模就是一件很自然的事情了。
单纯的ME,由于没有利用历史信息,对于序列问题的效果并不好。因此,仿照HMM,又引入了Markov Model,这也就是MEMM得名的原因。
我们回过头来,再看《机器学习(三十)》中的这张图:
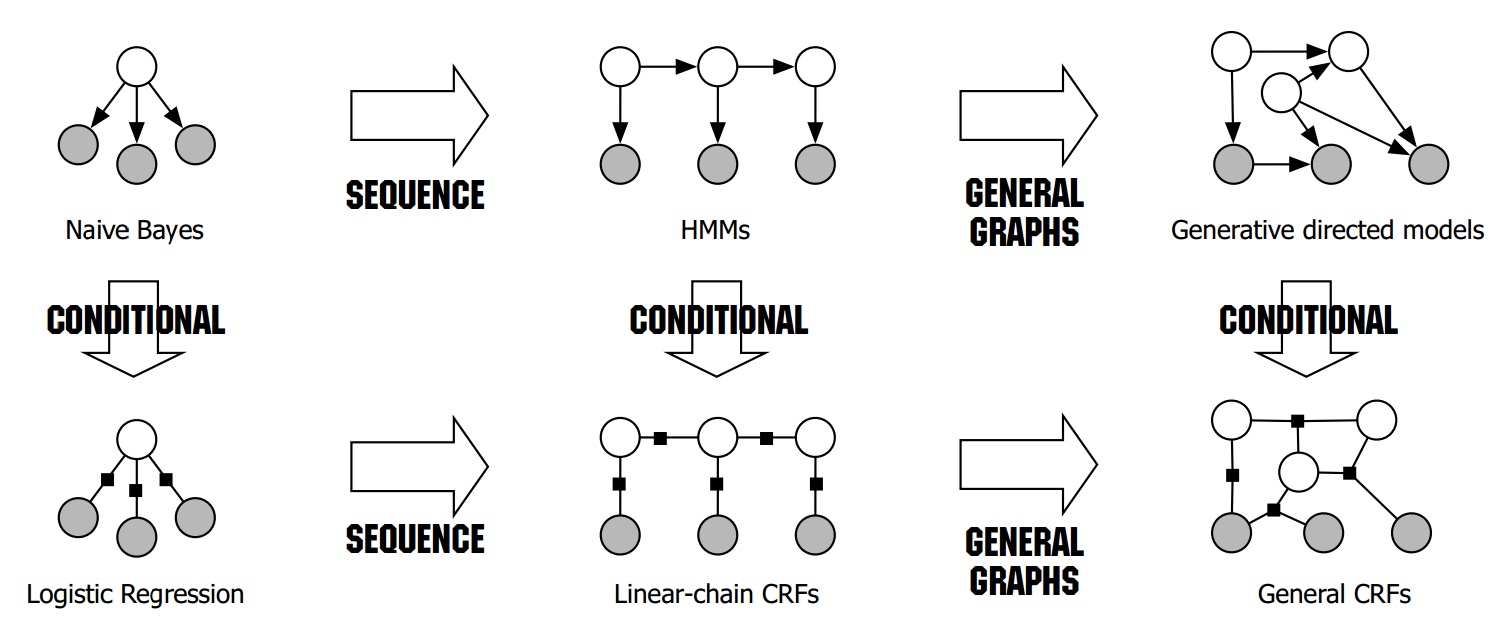
显然,如果考虑历史信息的话,Naive Bayes就变成了HMMs,同理,LR就变成了CRF。(MEMM和CRF在这一点上是一致的)
- 概率图表示
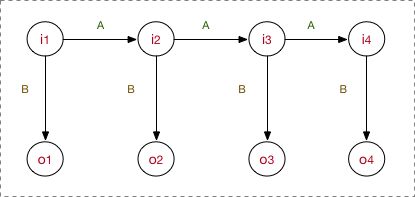
上图是HMM的概率图表示。其中,i表示状态节点,o表示观测节点。从中可以看出,\(o_t\)的状态,只取决于\(i_t\),而\(i_t\)的状态,只取决于\(i_{t-1}\)的状态。
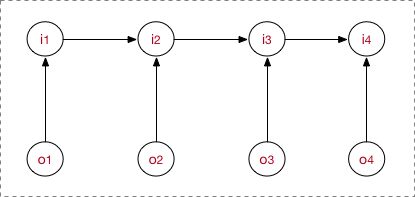
上图是MEMM的概率图表示。MEMM当前隐藏状态\(i_t\)依赖于当前时刻的观测节点\(o_t\)和上一时刻的隐藏节点\(i_{t-1}\)。
- 特征建模
HMM的建模实际上是比较简单的了,主要就是状态转移概率矩阵和观测概率矩阵。这些都是一阶线性的特征了。
MEMM不局限于这样的简单特征,你可以用任意复杂的方式定义特征。一般将特征函数表示为:\(f_a(i,o)\)。其中,a表示特征。一个MEMM模型可以包含任意多个特征。
综上,我们可以给出MEMM的公式:
\[P(I|O)=\prod_{t=1}^n\frac{\exp(\sum_a \lambda_a f_a(i,o))}{Z(i,o)}\tag{2}\]其中Z为归一化因子:\(Z=\sum_i \exp(\sum_a \lambda_a f_a(i,o))\)
这里的\(\lambda_a\)就是模型需要学习的参数。
MEMM存在labeling bias问题。
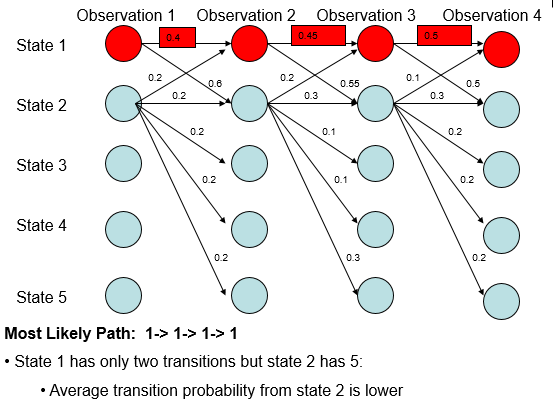
如上面的例子,可以看出:
-
无论观测值,State 1总是更倾向于转移到State 2;
-
无论观测值,State 2总是更倾向于转移到State 2;
因此,无论初值如何,Most Likely Path最终待在State 2中,才是合理的。然而MEMM却认为待在State 1中才合理。
产生这种现象的原因是,State 1有2个转移方式,而State 2有5个转移方式。这就导致尽管State 1->State 1是小概率事件,但也比State 2的任意一个转移事件的概率大。谁叫后者的概率这么分散呢?
参考:
http://www.cnblogs.com/en-heng/p/6201893.html
中文分词:最大熵马尔可夫模型MEMM
http://www.cnblogs.com/549294286/archive/2013/06/06/3121761.html
统计模型之间的比较,HMM,最大熵模型,CRF条件随机场
http://blog.csdn.net/caohao2008/article/details/4242308
HMM,MEMM,CRF模型的比较
http://blog.csdn.net/zhoubl668/article/details/7787690
标注偏置问题(Label Bias Problem)和HMM、MEMM、CRF模型比较
http://tripleday.cn/2016/07/14/hmm-memm-crf/
HMM、MEMM和CRF的学习总结
https://zhuanlan.zhihu.com/p/33397147
概率图模型体系:HMM、MEMM、CRF
CRF
概述
条件随机场(Conditional Random Field)由Lafferty等人于2001年提出,结合了最大熵模型和隐马尔可夫模型的特点,是一种无向图模型,近年来在分词、词性标注和命名实体识别等序列标注任务中取得了很好的效果。
上面我们为了解释HMM和MEMM的区别,对MEMM做了一定的简化,事实上MEMM还可以是这样的:
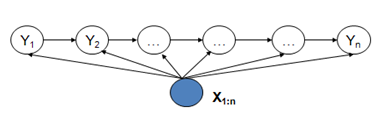
这表明,MEMM可以利用观测序列的全序列信息,而不仅仅是当前的观测值。至于MEMM的隐藏状态,则还是只依赖上一个隐藏状态。
CRF是一种特殊的MRF。MRF定义的是联合概率,而CRF定义的是条件概率,故名。
在CRF中,最常用的是Linear-chain CRF。
Linear-chain CRF和MEMM类似,也对隐藏状态的依赖进行了约束:只依赖上一个隐藏状态。
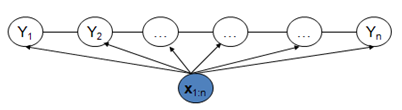
有的时候,Linear-chain CRF也被不加区分的简称为CRF。下文如无特指,CRF均指的是Linear-chain CRF,它的概率图如下所示:
根据MRF的公式(公式1)和MEMM的公式(公式2),我们可以得到CRF的公式如下:
\[P(I|O)=\frac{\prod_{t=1}^n\exp(\sum_a \lambda_a f_a(i,o))}{Z(i,o)}\]由于Z位置的不同,CRF的概率是全局归一化的,而MEMM是局部归一化的,因此CRF没有labeling bias的问题。
CRF的训练和推断
与HMM类似,CRF也有三个基本问题:
- 计算问题
给定条件随机场\(P(Y\mid X)\),输入序列x和输出序列y,计算条件概率和以及对应的期望。(前向后向算法)
- 解码问题
给定条件随机场\(P(Y\mid X)\)和输入序列x,求条件概率最大的输出序列y,即对观测序列进行标注。(维特比算法)

您的打赏,是对我的鼓励
