ML » 机器学习(二十三)——训练集、验证集和测试集, Optimizer
2017-06-13 :: 6304 Words机器学习分类器性能指标(续)
https://mp.weixin.qq.com/s/k-Jm24aMlPgWMtFYaKNlog
信息检索中的度量指标全解析
https://mp.weixin.qq.com/s/Q_lN83h6nA242_Tv9hqtPQ
关于个性化排序任务评价指标的大讨论
https://zhuanlan.zhihu.com/p/161703182
深挖一下F1 score
https://zhuanlan.zhihu.com/p/69101372
分类问题的评估指标一览
https://zhuanlan.zhihu.com/p/92792702
AUC的缺陷
https://zhuanlan.zhihu.com/p/33025359
ROC和CMC曲线的理解(FAR, FRR的理解)
https://mp.weixin.qq.com/s/5Kl311pNRSwjo0yDGsrySA
小孩都看得懂的ROC
训练集、验证集和测试集
对于一个模型来说,其参数可以分为普通参数和超参数。在不引入强化学习的前提下,那么普通参数就是可以被梯度下降所更新的,也就是训练集所更新的参数。另外,还有超参数的概念,比如网络层数、网络节点数、迭代次数、学习率等等,这些参数不在梯度下降的更新范围内。尽管现在已经有一些算法可以用来搜索模型的超参数,但多数情况下我们还是自己人工根据验证集来调。
从狭义来讲,验证集没有参与梯度下降的过程,也就是说是没有经过训练的;但从广义上来看,验证集却参与了一个“人工调参”的过程,我们根据验证集的结果调节了迭代数、调节了学习率等等,使得结果在验证集上最优。因此,我们也可以认为,验证集也参与了训练。
那么就很明显了,我们还需要一个完全没有经过训练的集合,那就是测试集。
参考:
http://kexue.fm/archives/4638/
训练集、验证集和测试集的意义
https://zhuanlan.zhihu.com/p/48976706
训练集、验证集和测试集
https://mp.weixin.qq.com/s/idS2l7u_OBxWi5UBexlK4w
如何正确使用机器学习中的训练集、验证集和测试集?
https://mp.weixin.qq.com/s/ubpRPQ7-1nvY5CzICWi1Cg
似乎没区别,但你混淆过验证集和测试集吗?
Optimizer
在《机器学习(一)》中,我们已经指出梯度下降是解决凸优化问题的一般方法。而如何更有效率的梯度下降,就是本节中Optimizer的责任了。
教程
http://www.stat.cmu.edu/~ryantibs/convexopt/
Machine Learning 10-725: Convex Optimization
https://mp.weixin.qq.com/s/9BRhZd6x-JCNNVzt2ndYKQ
最新《深度学习优化问题》教程,78页ppt,台大林智仁教授讲解
原始版本
早期的梯度下降法一般用以下公式确定学习率:
\[\eta_t=\frac{\eta_0}{\sqrt{t+1}}\]Momentum
Momentum是梯度下降法中一种常用的加速技术。其公式为:
\[v_t = \gamma v_{t-1} + \eta \nabla_\theta J( \theta)\] \[\theta = \theta - v_t\]从上式可以看出,参数的更新值\(v_t\),不仅取决于当前梯度\(\nabla_\theta J( \theta)\),还取决于上一刻的速度\(v_{t-1}\)。
Nesterov accelerated gradient
该方法是Momentum的一个变种。其公式为:
\[v_t = \gamma v_{t-1} + \eta \nabla_\theta J( \theta - \gamma v_{t-1})\] \[\theta = \theta - v_t\]Yurii Nesterov,莫斯科大学应用数学系本科(1977年),凸优化理论专家。法国鲁汶天主教大学教授。2009年获John von Neumann Theory Prize。
参考:
https://zhuanlan.zhihu.com/p/22810533
比Momentum更快:揭开Nesterov Accelerated Gradient的真面目
https://zhuanlan.zhihu.com/p/27435669
从Nesterov的角度看:我们为什么要研究凸优化?
https://www.cs.cmu.edu/~ggordon/10725-F12/slides/09-acceleration.pdf
Accelerated first-order methods
Adagrad
Momentum算法中所有的参数\(\theta\)都使用同一个学习率,而Adagrad采用了另一种方法进行优化:为每个参数确定不同的学习率。
Adagrad的基本思想:给经常更新的参数一个较小的学习率,而给很少更新的参数一个较大的学习率。
其公式为:
\[g_{t, i} = \nabla_\theta J( \theta_i )\] \[\theta_{t+1, i} = \theta_{t, i} - \dfrac{\eta}{\sqrt{G_{t, ii} + \epsilon}} \cdot g_{t, i}\]其中,\(G_{t, ii}\)表示参数\(\theta_i\)梯度平方和的历史累积值,\(\epsilon\)是为了防止分母为0,而加入的平滑项,数量级一般为\(10^{-8}\)。
有趣的是,如果去掉上式中的根号,则其效果会变糟。
Adagrad的优点在于:它是一个自适应算法,初值选择显得不太重要了。
Adagrad的缺点在于:训练越往后,G越大,从而学习率越小。如果在训练完成之前,学习率变为0,就会导致提前结束训练。
Adadelta
为了克服Adagrad的缺点,Matthew D. Zeiler于2012年提出了Adadelta算法。
Matthew D. Zeiler,多伦多大学本科(2009)+纽约大学博士(2013)。Clarifai创始人和CEO。读书期间,他还创立了一家给大学生卖习题册的公司。
个人主页:
http://www.matthewzeiler.com/
该算法不再使用历史累积值,而是只取最近的w个状态,这样就不会让梯度被惩罚至0。
为了避免保存前w个状态的梯度平方和,可做如下变换:
\[E[g^2]_t = \gamma E[g^2]_{t-1} + (1 - \gamma) g^2_t\] \[\theta_{t+1} = \theta_{t} - \dfrac{\eta}{\sqrt{E[g^2]_t + \epsilon}} g_{t}\]上边的公式,就是Hinton在同一年提出的RMSprop算法。其中的\(\gamma E[g^2]_{t-1}\)即可看作是前w个状态的滤波值,也可看作是Momentum算法中动量值。
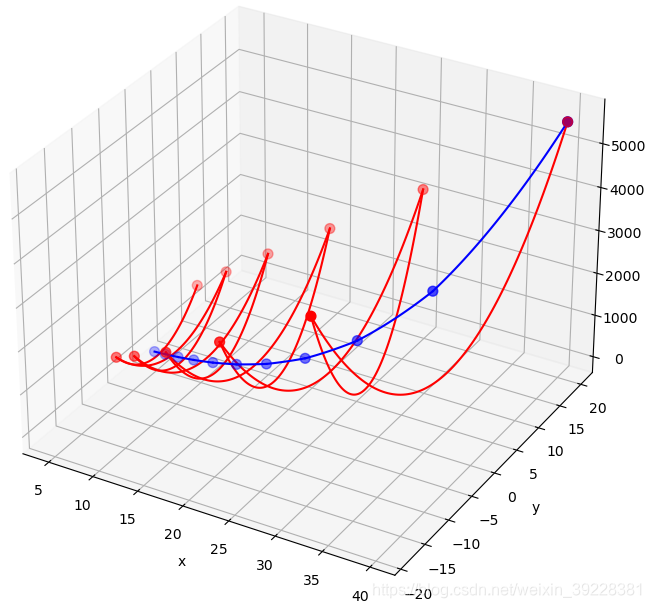
其中红色对应SGD,蓝色对应RMSProp。可以看出通过RMSProp,有效消除了梯度差异导致的抖动。
Adadelta在RMSprop的基础上更进一步:
\[RMS[g]_{t}=\sqrt{E[g^{2}]_{t}+\epsilon }\] \[\Delta \theta_t = - \dfrac{RMS[\Delta \theta]_{t-1}}{RMS[g]_{t}} g_{t}\]也就是说,Adadelta不仅考虑了梯度的平方和,也考虑了更新量的平方和。
Adam
Adaptive Moment Estimation借用了卡尔曼滤波的思想,对\(g_t,g_t^2\)进行滤波:
\[m_t = \beta_1 m_{t-1} + (1 - \beta_1) g_t\] \[v_t = \beta_2 v_{t-1} + (1 - \beta_2) g_t^2\]估计:
\[\hat{m}_t = \dfrac{m_t}{1 - \beta^t_1}\] \[\hat{v}_t = \dfrac{v_t}{1 - \beta^t_2}\]更新:
\[\theta_{t+1} = \theta_{t} - \dfrac{\eta}{\sqrt{\hat{v}_t} + \epsilon} \hat{m}_t\]https://blog.csdn.net/nyist_yangguang/article/details/121603917
Adam各个参数分析
AdamW
Adam自动调整学习率,大幅提高了训练速度,但是有相当多的资料报告Adam优化的最终精度略低于SGD。问题出在哪呢,其实Adam本身没有问题,问题在于目前大多数DL框架的L2 loss实现用的是weight decay的方式,而weight decay在与Adam共同使用的时候有互相耦合。
为了解决这个问题,人们又提出了AdamW。
参考:
https://zhuanlan.zhihu.com/p/63982470
都9102年了,别再用Adam + L2 regularization了
Nadam
http://cs229.stanford.edu/proj2015/054_report.pdf
ncorporating Nesterov Momentum into Adam
AdaSecant
《ADASECANT: Robust Adaptive Secant Method for Stochastic Gradient》
Lion & Tiger
https://kexue.fm/archives/9473
Google新搜出的优化器Lion:效率与效果兼得的“训练狮”
https://kexue.fm/archives/9512
Tiger:一个“抠”到极致的优化器
二阶Optimizer
虽然二阶Optimizer的收敛效果优于一阶Optimizer,但由于计算量较大,通常用的较少。
常用的算法有BGFS和L-BFGS。
第一个拟牛顿法是由Bill Davidon、Roger Fletcher和Michael James David Powell于1959年提出的DFP算法。
到了60年代末期,作为DFP算法的改进,出现了BFGS算法。(Charles Broyden、Roger Fletcher、Donald Goldfarb、David Shanno)。
以下是部分作者的简历:
https://mp.weixin.qq.com/s/2ZfdPKo9HMjBe2QSuwWRzg
数学优化方法中的F——Roger Fletcher
https://mp.weixin.qq.com/s/dZ7TlqbgsK3RU8prJ3o-oA
宝藏数学家的优化人生(M.J.D. Powell)
参考:
http://www.cnblogs.com/kemaswill/p/3352898.html
优化算法-BFGS
http://blog.csdn.net/acdreamers/article/details/44728041
L-BFGS算法
https://mp.weixin.qq.com/s/lGrTUYALmKOQkO70DZpbPQ
小改进,大飞跃:深度学习中的最小牛顿求解器
https://mp.weixin.qq.com/s/uHrRBS3Ju9MAWbaukiGnOA
二阶梯度优化新崛起,超越Adam,Transformer只需一半迭代量
https://mp.weixin.qq.com/s/JOyHFbtO7v0DgCKVNmhyYQ
拟牛顿法:BFGS,DFP,DM条件
非梯度优化/非凸优化
对于深度学习模型的优化问题来说,随机梯度下降(SGD)是一种被广为使用方法。然而,实际上SGD并非我们唯一的选择。当我们使用一个“黑盒算法”时,即使不知道目标函数f(x):Rn→R的精确解析形式(因此不能计算梯度或Hessian矩阵)你也可以对f(x)进行评估。经典的黑盒优化方法包括“模拟退火算法”、“爬山法”以及“单纯形法”。演化策略(ES)是一类诞生于演化算法(EA)黑盒优化算法。
参考:
https://mp.weixin.qq.com/s/USHad8UvhsqWTI4MJmif5g
在深度学习模型的优化上,梯度下降并非唯一的选择
https://mp.weixin.qq.com/s/9G_7Ax9cPcQcYVqEfc-pyw
从基础知识到实际应用,一文了解“机器学习非凸优化技术”
https://zhuanlan.zhihu.com/p/27554191
非凸优化基石:Lipschitz Condition
https://mp.weixin.qq.com/s/LY1-F5hEyM40DrvobYRexA
腾讯AI Lab&北大提出基于随机路径积分的差分估计子非凸优化方法
https://mp.weixin.qq.com/s/P0qzzyVQke_c-RUF0Faitw
怎么判断一个优化问题是凸优化还是非凸优化?
https://mp.weixin.qq.com/s/NlxZQv8Z-AzIlz6mG8cCxQ
离散/整数/组合/非凸优化概述及其在AI的应用
https://www.zhihu.com/question/38677354
梯度下降法是万能的模型训练算法吗?
https://github.com/eyounx/ZOOpt
一个非梯度优化的工具
Muon
Muon:MomentUm Orthogonalized by Newton-schulz
Muon优化器是OpenAI研究员Keller Jordan的作品。
SGD、Adam、Tiger等常见优化器的更新规则是Element-wise的,即不论向量、矩阵参数,实际都视为一个大向量,分量按照相同的规则独立地更新。
Muon以矩阵为基本单位,考虑了矩阵的一些独有特性。
其更新规则是:
\[\begin{equation}\begin{aligned} \boldsymbol{M}_t =&\, \beta\boldsymbol{M}_{t-1} + \boldsymbol{G}_t \\[5pt] \boldsymbol{W}_t =&\, \boldsymbol{W}_{t-1} - \eta_t [\text{msign}(\boldsymbol{M}_t) + \lambda \boldsymbol{W}_{t-1}] \\ \end{aligned}\end{equation}\]
您的打赏,是对我的鼓励
