ML » 机器学习(五)——SVM(1)
2016-08-21 :: 7512 WordsSVM
拉格朗日对偶(续)
上述约束优化问题也被称为原始优化问题(primal optimization problem)。为了求解这个问题,我们定义广义拉格朗日(generalized Lagrangian)函数:
\[\mathcal{L}(w,\alpha,\beta)=f(w)+\sum_{i=1}^k\alpha_ig_i(w)+\sum_{i=1}^l\beta_ih_i(w)\]利用这个函数可以将约束优化问题转化为无约束优化问题。其中的\(\alpha_i\)、\(\beta_i\)也被称作拉格朗日乘子(Lagrange multiplier)。
\[\theta_\mathcal{P}(w)=\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}\mathcal{L}(w,\alpha,\beta)=\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}f(w)+\sum_{i=1}^k\alpha_ig_i(w)+\sum_{i=1}^l\beta_ih_i(w)\]其中,\(\mathcal{P}\)代表原始优化问题,\(\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}\)表示在\(\alpha,\beta\)变化,而其他变量不变的情况下,求最大值。
如果w不满足约束,也就是\(g_i(w)>0\)或\(h_i(w)\ne 0\)。这时由于\(\mathcal{L}\)函数是无约束函数,\(\alpha_i\)、\(\beta_i\)可以任意取值,因此\(\sum_{i=1}^k\alpha_ig_i(w)\)或\(\sum_{i=1}^l\beta_ih_i(w)\)并没有极值,也就是说\(\theta_\mathcal{P}(w)=\infty\)。
反之,如果w满足约束,则\(\sum_{i=1}^k\alpha_ig_i(w)\)和\(\sum_{i=1}^l\beta_ih_i(w)\)都为0,因此\(\theta_\mathcal{P}(w)=f(w)\)。
综上:
\[\theta_\mathcal{P}(w)=\begin{cases} f(w), & w满足约束 \\ \infty, & w不满足约束 \\ \end{cases}\]我们定义:
\[p^*=\underset{w}{\operatorname{min}}\theta_\mathcal{P}(w)=\underset{w}{\operatorname{min}}\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}\mathcal{L}(w,\alpha,\beta)\]下面我们定义对偶函数:
\[\theta_\mathcal{D}(w)=\underset{w}{\operatorname{min}}\mathcal{L}(w,\alpha,\beta)\]这里的\(\mathcal{D}\)代表原始优化问题的对偶优化问题。仿照原始优化问题定义如下:
\[d^*=\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}\theta_\mathcal{D}(w)=\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}\underset{w}{\operatorname{min}}\mathcal{L}(w,\alpha,\beta)\]这里我们不加证明的给出如下公式:
\[d^*=\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}\underset{w}{\operatorname{min}}\mathcal{L}(w,\alpha,\beta)\le\underset{w}{\operatorname{min}}\underset{\alpha,\beta:\alpha_i\ge 0}{\operatorname{max}}\mathcal{L}(w,\alpha,\beta)=p^*\]这样的对偶问题被称作拉格朗日对偶(Lagrange duality)。
参考:
https://mp.weixin.qq.com/s/IhvdhEnyRI2DRns9EkCy5Q
拉格朗日对偶理论
https://www.zhihu.com/question/58584814
如何通俗地讲解对偶问题?尤其是拉格朗日对偶lagrangian duality?
KKT条件
拉格朗日对偶公式中使\(p^*=d^*\)成立的条件,被称为KKT条件(Karush-Kuhn-Tucker conditions):
\[\begin{align} \frac{\partial}{\partial w_i}\mathcal{L}(w^*,\alpha^*,\beta^*) & =0,i=1,\dots,n & \\ \frac{\partial}{\partial \beta_i}\mathcal{L}(w^*,\alpha^*,\beta^*) & =0,i=1,\dots,l & \\ \alpha_i^*g_i(w^*)& =0,i=1,\dots,k & \tag{1}\\ g_i(w^*)& \le 0,i=1,\dots,k & \\ \alpha_i^* & \ge 0,i=1,\dots,k & \\ \end{align}\]其中的\(w^*,\alpha^*,\beta^*\)表示满足KKT条件的相应变量的取值。条件1也被称为KKT对偶互补条件(KKT dual complementarity condition)。显然这些\(w^*,\alpha^*,\beta^*\)既是原始问题的解,也是对偶问题的解。
严格的说,KKT条件是非线性约束优化问题存在最优解的必要条件。这个问题的充分条件比较复杂,这里不做讨论。
Harold William Kuhn,1925~2014,美国数学家,普林斯顿大学教授。
Albert William Tucker,1905~1995,加拿大数学家,普林斯顿大学教授。
William Karush,1917~1997,美国数学家,加州州立大学北岭分校教授。(注意,California State University和University of California是不同的学校)
参考:
https://mp.weixin.qq.com/s/AKTGyHlbCj0P949K-LAv6A
拉格朗日乘数法
https://www.zhihu.com/question/64834116
拉格朗日乘子法漏解的情况?
https://mp.weixin.qq.com/s/UyNpJZ7k_q1qVdcNhrzDcQ
直观详解:拉格朗日乘法和KKT条件
https://mp.weixin.qq.com/s/PELnlB5vMV0gGJbL6BzoIA
原始-对偶算法的设计原理
https://mp.weixin.qq.com/s/5655NgkxrbK3qtA4Ilxd4w
为何引入对偶问题
https://mp.weixin.qq.com/s/PRKEIW3HEafytUNscHSLpA
如何写对偶问题
支持向量
针对最优边距分类问题,我们定义:
\[g_i(w)=-y^{(i)}(w^Tx^{(i)}+b)+1\le 0\]由KKT对偶互补条件可知,如果\(\alpha_i>0\),则\(g_i(w)=0\)。
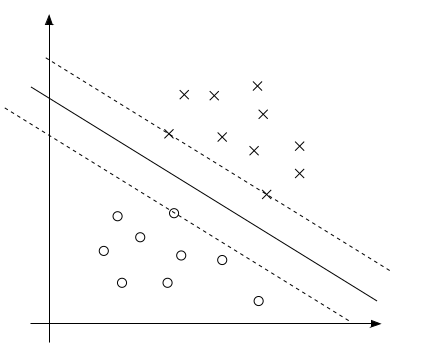
上图中的实线表示最大边距的分割超平面。由之前对于边距的几何意义的讨论可知,只有离该分界线最近的几个点(即图中的所示的两个x点和一个o点)才会取得约束条件的极值,即\(g_i(w)=0\)。也只有这几个点的\(\alpha_i>0\),其余点的\(\alpha_i=0\)。这样的点被称作支持向量(support vectors)。显然支持向量的数量是远远小于样本集的数量的。
为我们的问题构建拉格朗日函数如下:
\[\mathcal{L}(w,b,\alpha)=\frac{1}{2}\|w\|^2-\sum_{i=1}^m\alpha_i[y^{(i)}(w^Tx^{(i)}+b)-1] \tag{2}\]为了求解
\[\theta_\mathcal{D}(\alpha)=\underset{w,b}{\operatorname{min}}\mathcal{L}(w,b,\alpha)\]可得:
\[\nabla_w\mathcal{L}(w,b,\alpha)=w-\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}=0\]即
\[w=\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)} \tag{3}\]对b求导可得:
\[\frac{\partial}{\partial b}\mathcal{L}(w,b,\alpha)=\sum_{i=1}^m\alpha_iy^{(i)}=0 \tag{4}\]把公式3代入公式2,可得:
\[\begin{align}\mathcal{L}(w,b,\alpha)&=\frac{1}{2}\|w\|^2-\sum_{i=1}^m\alpha_i[y^{(i)}(w^Tx^{(i)}+b)-1] \\&=\frac{1}{2}w^Tw-\sum_{i=1}^m\alpha_iy^{(i)}w^Tx^{(i)}-\sum_{i=1}^m\alpha_iy^{(i)}b+\sum_{i=1}^m\alpha_i \\&=\frac{1}{2}w^T\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}-\sum_{i=1}^m\alpha_iy^{(i)}w^Tx^{(i)}-\sum_{i=1}^m\alpha_iy^{(i)}b+\sum_{i=1}^m\alpha_i \\&=\frac{1}{2}w^T\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}-w^T\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}-\sum_{i=1}^m\alpha_iy^{(i)}b+\sum_{i=1}^m\alpha_i \\&=-\frac{1}{2}w^T\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}-b\sum_{i=1}^m\alpha_iy^{(i)}+\sum_{i=1}^m\alpha_i \\&=-\frac{1}{2}\left(\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}\right)^T\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}-b\sum_{i=1}^m\alpha_iy^{(i)}+\sum_{i=1}^m\alpha_i \\&=-\frac{1}{2}\sum_{i=1}^m\alpha_iy^{(i)}(x^{(i)})^T\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}-b\sum_{i=1}^m\alpha_iy^{(i)}+\sum_{i=1}^m\alpha_i \\&=\sum_{i=1}^m\alpha_i-\frac{1}{2}\sum_{i,j=1}^my^{(i)}y^{(j)}\alpha_i\alpha_j(x^{(i)})^Tx^{(j)}-b\sum_{i=1}^m\alpha_iy^{(i)} \tag{5} \end{align}\]我们定义如下内积符号\(\langle x,y\rangle=x^Ty\),并将公式4代入公式5可得:
\[\mathcal{L}(w,b,\alpha)=\sum_{i=1}^m\alpha_i-\frac{1}{2}\sum_{i,j=1}^my^{(i)}y^{(j)}\alpha_i\alpha_j\langle x^{(i)},x^{(j)}\rangle\]最终我们得到如下对偶优化问题:
\[\begin{align} &\operatorname{max}_\alpha & & W(\alpha)=\sum_{i=1}^m\alpha_i-\frac{1}{2}\sum_{i,j=1}^my^{(i)}y^{(j)}\alpha_i\alpha_j\langle x^{(i)},x^{(j)}\rangle\\ &\operatorname{s.t.}& & \alpha_i\ge 0,i=1,\dots,m\\ & & & \sum_{i=1}^m\alpha_iy^{(i)}=0 \end{align}\]这个对偶问题的求解,留在后面的章节。这里只讨论求解出\(\alpha^*\)之后的情况。
首先,根据公式3可求解\(w^*\)。然后
\[b^*=-\frac{\max_{i:y^{(i)}=-1}w^{*T}x^{(i)}+\min_{i:y^{(i)}=1}w^{*T}x^{(i)}}{2}\]除此之外,我们还有:
\[w^Tx+b=\left(\sum_{i=1}^m\alpha_iy^{(i)}x^{(i)}\right)^Tx+b=\sum_{i=1}^m\alpha_iy^{(i)}\langle x^{(i)},x\rangle+b\]在之前的讨论中,我们已经指出只有支持向量对应的\(\alpha_i\)才为非零值,因此:
\[w^Tx+b=\sum_{i\in SV}\alpha_iy^{(i)}\langle x^{(i)},x\rangle+b\]从上式可以看出,在空间维数比较高的情况下,SVM(support vector machines)可以有效降低计算量。
核函数
假设我们从样本点的分布中看到x和y符合3次曲线,那么我们希望使用x的三次多项式来逼近这些样本点。那么首先需要将特征x扩展到三维\((x,x^2,x^3)\) ,然后寻找特征和结果之间的模型。我们将这种特征变换称作特征映射(feature mapping)。
映射函数记作\(\phi(x)\),在这个例子中
\[\phi(x)=\begin{bmatrix} x \\ x^2 \\ x^3 \end{bmatrix}\]有的时候,我们希望将特征映射后的特征,而不是最初的特征,应用于SVM分类。这样做的情况,除了上面提到的拟合问题之外,还在于样例可能存在线性不可分的情况,而将特征映射到高维空间后,往往就可分了。如下图所示:

为此,我们给出核函数(Kernel)的形式化定义:
\[K(x,z)=\phi(x)^T\phi(z)\]之所以是形式化定义,这主要在于我们并不利用\(\phi(x)\)来计算\(K(x,z)\),而是给定K(x,z),来倒推\(\phi(x)\),从而建立\(\phi(x)\)和\(K(x,z)\)之间的对应关系。
例如:
\[\begin{align}K(x,z)&=(x^Tz)^2=\left(\sum_{i=1}^nx_iz_i\right)\left(\sum_{i=1}^nx_iz_i\right) \\&=\sum_{i=1}^n\sum_{j=1}^nx_ix_jz_iz_j=\sum_{i,j=1}^n(x_ix_j)(z_iz_j) \end{align}\]根据上式可得:(这里假设\(n=3\))
\[\phi(x)=\begin{bmatrix} x_1x_1 \\ x_1x_2 \\ x_1x_3 \\ x_2x_1 \\ x_2x_2 \\ x_2x_3 \\ x_3x_1 \\ x_3x_2 \\ x_3x_3 \\ \end{bmatrix}\]可以看出\(\phi(x)\)的计算复杂度是\(O(n^2)\),而\((x^Tz)^2\)的计算复杂度是\(O(n)\)。
下面我们讨论其他几种常用核函数和它对应的\(\phi(x)\)。
\[\begin{align}K(x,z)&=(x^Tz+c)^2 \\&=\sum_{i,j=1}^n(x_ix_j)(z_iz_j)+\sum_{i=1}^n(\sqrt{2c}x_i)(\sqrt{2c}z_i)+c^2 \end{align}\]同样的:(\(n=3\))
\[\phi(x)=\begin{bmatrix} x_1x_1 \\ x_1x_2 \\ x_1x_3 \\ x_2x_1 \\ x_2x_2 \\ x_2x_3 \\ x_3x_1 \\ x_3x_2 \\ x_3x_3 \\ \sqrt{2c}x_1 \\ \sqrt{2c}x_2 \\ \sqrt{2c}x_3 \\ c \end{bmatrix}\]更一般的,对于\(K(x,z)=(x^Tz+c)^d\),其对应的\(\phi(x)\)是\(\begin{bmatrix} n+d \\ d \\ \end{bmatrix}\)维向量。
我们也可以从另外的角度观察\(K(x,z)=\phi(x)^T\phi(z)\)。从内积的几何意义来看,如果\(\phi(x)\)和\(\phi(z)\)夹角越小,则\(K(x,z)\)的值越大;反之,如果\(\phi(x)\)和\(\phi(z)\)的夹角越接近正交,则\(K(x,z)\)的值越小。因此,\(K(x,z)\)也叫做\(\phi(x)\)和\(\phi(z)\)的余弦相似度。

您的打赏,是对我的鼓励
