DL » 深度学习(三十二)——点云, AutoDL(1), PDE
2018-01-19 :: 6411 WordsSENet(续)
参考:
https://mp.weixin.qq.com/s/tLqsWWhzUU6TkDbhnxxZow
Momenta详解ImageNet 2017夺冠架构SENet
http://blog.csdn.net/u014380165/article/details/78006626
SENet(Squeeze-and-Excitation Networks)算法笔记
https://mp.weixin.qq.com/s/ao7gOfMYDJDPsNMVV9-Dlg
后ResNet时代:SENet与SKNet
https://mp.weixin.qq.com/s/_7Iir2DZ_lROyR-BxScbnA
SANet:视觉注意力SE模块的改进,并用于语义分割
点云
概述
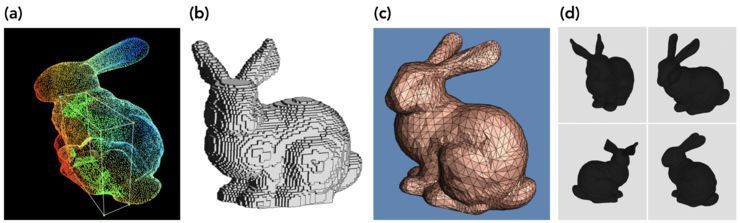
上图是3D数据的不同表示类型:(a)点云(Point clouds);(b) 体素网格(Voxel grids); (c) 多边形网格(Polygon meshes); (d) 多视图表示(Multi-view representations)
a. 点云是三维空间(xyz坐标)点的集合。
b. 体素是3D空间的像素。量化的,大小固定的点云。每个单元都是固定大小和离散坐标。
c. mesh是面片的集合。
d. 多视图表示是从不同模拟视点渲染的2D图像集合。
参考:
https://zhuanlan.zhihu.com/p/348563616
什么是体素(Voxel)?
PCL
The Point Cloud Library是一个点云处理的库。
官网:
http://www.pointclouds.org/
参考
https://github.com/Yochengliu/awesome-point-cloud-analysis
三维点云论文和数据集
https://www.zhihu.com/column/c_1305511326216097792
一个激光雷达点云处理的专栏
https://mp.weixin.qq.com/s/f44TkWXklGONCuXnIuTbXg
无人驾驶汽车系统入门:基于VoxelNet的激光雷达点云车辆检测及ROS实现
https://www.zhihu.com/question/465405015
自动驾驶公司3d点云目标检测算法都基于哪个网络在做?
https://mp.weixin.qq.com/s/_lK-DPldCYGcicV7O0njfg
上海交大卢策吾团队开源PointSIFT刷新点云语义分割记录
https://zhuanlan.zhihu.com/p/41287237
点云感知CVPR 2018论文总结
https://zhuanlan.zhihu.com/p/103640399
Deep Learning for 3D Point Clouds: A Survey论文阅读
https://mp.weixin.qq.com/s/fPj4wMtiFX55c_UjNsQnBg
PointCNN全面刷新测试记录:山东大学提出通用点云卷积框架
http://mp.weixin.qq.com/s/5ozeLeF6IyKTOqAxYEdaog
山东大学提出PointCNN:让CNN更好地处理不规则和无序的点云数据
https://mp.weixin.qq.com/s/QHxuYWb39BktuTomiwG2rg
点云配准国内外研究现状
https://mp.weixin.qq.com/s/ki0F3zjbB_X84m9NsYYlow
旷视Oral论文提出GeoNet:基于测地距离的点云分析深度网络
https://mp.weixin.qq.com/s/X7ijhqXjICjIJh3nUNsuBw
百度无人车实现全球首个基于深度学习的激光点云自定位技术
https://mp.weixin.qq.com/s/iQwvqMfQgVZbOHeK-fVBIQ
PointConv:在点云上高效实现卷积操作
https://mp.weixin.qq.com/s/MQU98bk6tFRSJGDfRUFkOQ
Relation-Shape CNN:以几何关系卷积推理点云3D形状
https://mp.weixin.qq.com/s/u9BNyA06P96yIvA0uXUqAw
PointNet系列论文解读
https://mp.weixin.qq.com/s/KuoHFPpUYHPFacsBWZWVSg
Relation-Shape CNN:以几何关系卷积推理点云3D形状
https://mp.weixin.qq.com/s/Jso2YZs2NEtMORZsLkrJ5w
Geometric Relation Learning in 3D Point Cloud Analysis
https://mp.weixin.qq.com/s/sXxUh_9Kd_2BkISHbxL2CA
基于深度学习的实时激光雷达点云目标检测及ROS实现
https://mp.weixin.qq.com/s/dgDBmjavB0-Rz9VrsJ8vkQ
PointNet
https://zhuanlan.zhihu.com/p/71564244
PointRCNN第一个基于原始点云的3D目标检测
https://mp.weixin.qq.com/s/ZujYVfpM7ccGPqZnh1YsuQ
基于点云/RGBD的3D视觉检测技术
https://mp.weixin.qq.com/s/vewENL7bakutXraGkyjCMA
3D目标检测于RGB-D(Object detection in RGB-D images)
https://mp.weixin.qq.com/s/d1eGpZUVR25tusL4VtwHug
激光雷达深度补全
https://mp.weixin.qq.com/s/AOtC1PpTZM9zWPDuK4Vulg
贾佳亚等提出Fast Point R-CNN,利用点云快速高效检测3D目标
https://mp.weixin.qq.com/s/CN1vJ9to14QscgOVbMs3zg
端到端传感器建模生成激光雷达点云
https://mp.weixin.qq.com/s/vJ-BlxdY8rTwz7ygno6uWQ
DeepVCP:百度无人车提出首个端到端的高精度点云配准网络
https://zhuanlan.zhihu.com/p/91275450
点云配准综述
https://mp.weixin.qq.com/s/5RJAv_cOlhee1R9uZzkmHQ
国防科技大学发布最新“3D点云深度学习”综述论文,带你全面了解最新点云学习方法
https://mp.weixin.qq.com/s/JVFHgrctp-Mi9k7GtFQpFg
深度学习3D点云分割,22页综述全面了解领域最新进展
https://mp.weixin.qq.com/s/gybhVw3D4ykAHsVGzazWNw
3D-BoNet:一种简单高效的3D点云实例分割框架
https://mp.weixin.qq.com/s/xvAF_-rRlU5-hYmClFvTjA
一文览尽“基于激光雷达点云(lidar)的目标检测方法”
https://mp.weixin.qq.com/s/fn0EAanAEFT-Aupl4Skpcw
基于深度学习处理点云数据入门经典:PointNet、PointNet++
https://mp.weixin.qq.com/s/1M22-5ns3Mbd9_VJjTdGBQ
3D物体检测、行为预测和运动检测,一文解析激光雷达中时序融合的研究现状和发展方向
https://mp.weixin.qq.com/s/0OXtzUoNIyZFs-4PV173LQ
Apollo激光雷达感知技术解析
https://mp.weixin.qq.com/s/blWOcxts_V_0w0g8zFWz7w
自动驾驶之点云与图像融合综述
https://mp.weixin.qq.com/s/CMBNNhUrvfx87DeX0KbdXg
常用三维点云采样方法总结
https://mp.weixin.qq.com/s/GhJnofRLQWCnJNM4_DDtNA
点云配准算法ICP及其各种变体
AutoDL
DL领域目前存在的主要问题之一是:如何设计网络结构和调整超参数。目前的做法,通常依赖于作者的直觉,属于典型的拍脑袋想点子。
既然AI已经能够做很多事了,那么有没有可能,使用AI自动生成网络结构呢?
Google的这两篇论文在这里做了一些尝试:
《Neural Architecture Search With Reinforcement Learning》
《Learning Transferable Architectures for Scalable Image Recognition》
这里主要采用强化学习的方法,在一个广阔的搜索空间中,寻找最合适的网络结构。但对于计算能力提出了很高的要求。论文中提到,他们使用了500块GPU。有钱真的是可以为所欲为的。
这里学到的模型,一般被称为NASNet。
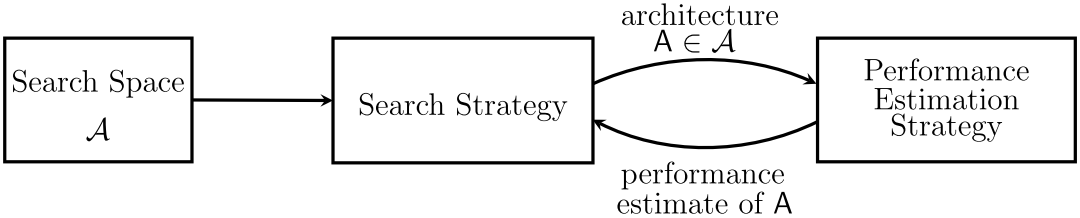
NAS的工作可以根据三个方面进行划分:search space(搜索空间)、search strategy(搜索策略)、performance estimation strategy(性能评估策略)。
AutoDL常用的套路主要有:
- random search/gird search。这是最古老的办法。
- reinforcement learning
- gradient-based
- weight-sharing
- evolutionary
- random graph
工具
https://mp.weixin.qq.com/s/9OZiFgziY8fMn-lkmdtiqQ
终结谷歌AutoML的真正杀手!Saleforce开源TransmogrifAI
https://mp.weixin.qq.com/s/GFjYzxf6IdKPvkij8-i_Dg
调参工要凉?微软重磅开源AutoML工具包NNI
https://mp.weixin.qq.com/s/7_KRT-rRojQbNuJzkjFMuA
微软开源自动机器学习工具NNI概览及新功能详解
https://mp.weixin.qq.com/s/L1nkhc4I6VX2s6S5Tiv0Zw
小白也能搭建深度模型,百度EasyDL的背后你知多少
https://mp.weixin.qq.com/s/HiD-OqAz67cwwchjSyIjWA
AutoML又一利器来了,谷歌宣布开源AdaNet
https://mp.weixin.qq.com/s/o3WqVIxlsukt3_JcY-10LA
AdaNet简介:快速灵活的AutoML,提供学习保证
https://mp.weixin.qq.com/s/2ehni5O__XnPaLjBRmAiIQ
利用AdaNet将多个TensorFlow Hub模块组合成一个集成网络
https://mp.weixin.qq.com/s/mEYFnP1q131-4hdgjOQ2cQ
“超参数”与“网络结构”自动化设置方法—DeepHyper
https://mp.weixin.qq.com/s/uF3R3FoERAKvIZLpgWp13A
BTB: 用于开发AutoML自动化机器学习系统的简单、可扩展库
https://mp.weixin.qq.com/s/TPC6ayQqKhlOpB8PrJHhZA
Microsoft NNI入门
书籍
https://mp.weixin.qq.com/s/wTwjbripELzqdCjs64Dzzw
告别调参,AutoML新书发布
ENAS
https://mp.weixin.qq.com/s/SwJs0OUzBlhiIOyFHFBK_g
一文看懂Jeff Dean等提出的ENAS到底好在哪?
https://mp.weixin.qq.com/s/Jw2kzCf2uFibhIpREnjO_A
图解高效神经网络结构搜索(ENAS)
https://mp.weixin.qq.com/s/RfONzym6-FQgF1J8wru35A
ENAS:首个权值共享的神经网络搜索方法,千倍加速
https://mp.weixin.qq.com/s/WMxPXDabYbDqLwM-9MX4aw
Efficient Neural Architecture Search
DARTS
论文:
《DARTS: Differentiable Architecture Search》
代码:
https://github.com/quark0/darts
参考:
https://mp.weixin.qq.com/s/bjVTpdaKFx4fFtT8BjMNew
指数级加速架构搜索:CMU提出基于梯度下降的可微架构搜索方法(DARTS)
https://mp.weixin.qq.com/s/Ihn-faO0XvfDDqtEwfWDzg
DARTS:基于梯度下降的经典网络搜索方法,开启端到端的网络搜索
动态神经网络
除了各种网络结构的搜索之外,还有动态神经网络这个流派。动态网络可以根据不同的输入调整其结构或参数,在精度、计算效率和适应性等方面具有显著优势。
https://mp.weixin.qq.com/s/s225jEDZRBggPuu2lOGnNA
动态神经网络最新综述论文
集成学习
神经网络集成学习,也是AutoDL的方法之一。
https://mp.weixin.qq.com/s/57Vxc1A5FCVbMdDYShWiDA
单网络内部集成:我要打十个!
PDE
偏微分方程(Partial differential equation)的求解一直是数学和物理的热点问题。
在前DL时代,主要有以下方法:
有限差分方法(FDM)是计算机数值模拟最早采用的方法,至今仍被广泛运用。该方法将求解域划分为差分网格,用有限个网格节点代替连续的求解域。
有限元方法(FEA)的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。
冯康,1920~1993。中国计算数学研究的奠基人和开拓者。中国科学院院士,中国科学院计算中心创始人。他独立于西方创始了有限元方法。当时,有限元法作为一种工程结构问题的数值分析方法才刚刚兴起,甚至连超级大国苏联都没有采用。
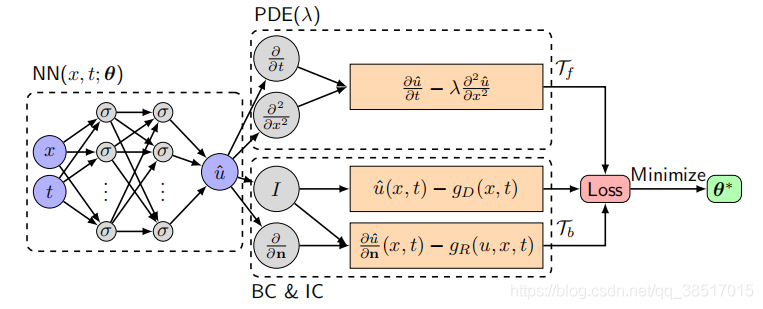
Physics-informed neural networks:
PINNs的Python库DeepXDE:
https://deepxde.readthedocs.io
参考:
https://blog.csdn.net/qq_38517015/article/details/101468893
《DeepXDE:a deep learning library for solving differential equations》梳理
https://mp.weixin.qq.com/s/X7aGCeUkLuuFbHrnK2TiMg
啥是有限元?

您的打赏,是对我的鼓励
